無人駕駛高爾夫撿球機器人方案
| 創科方案 |
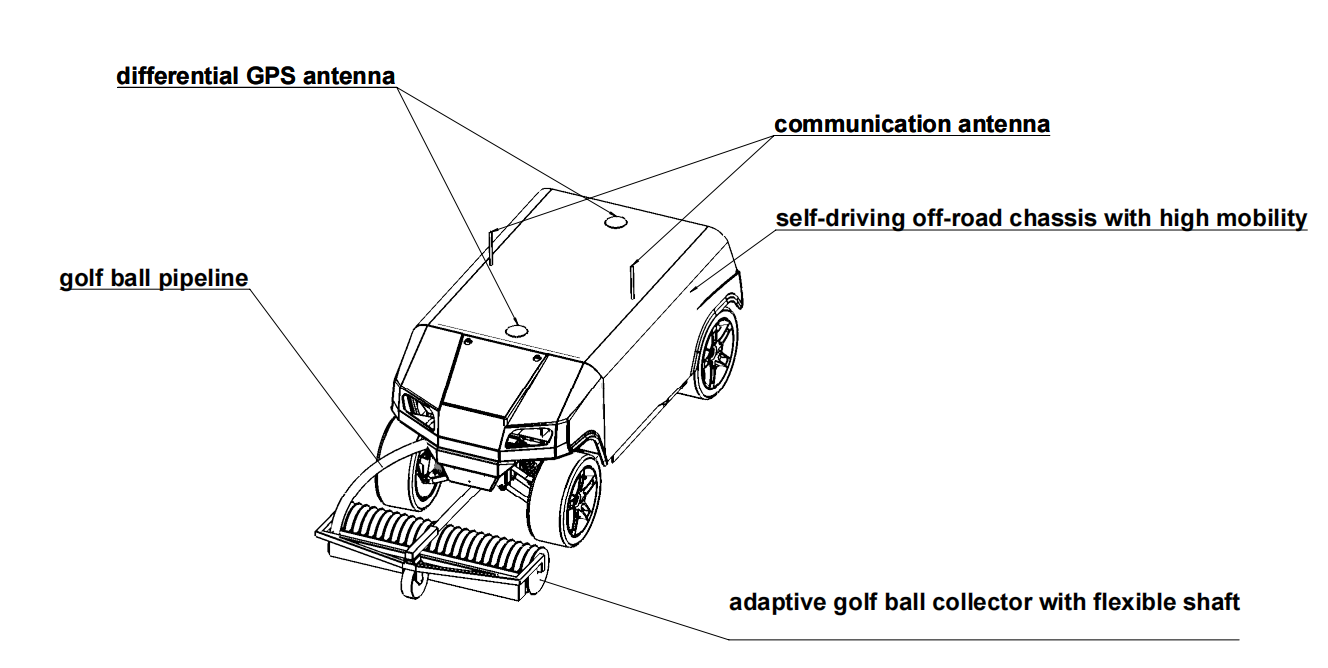
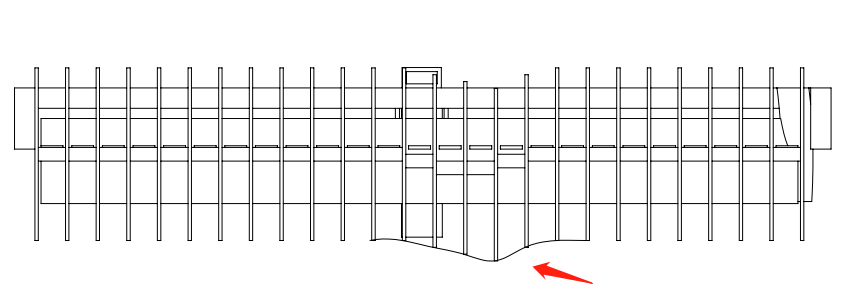
無人駕駛高爾夫撿球機器人方案
(編號 : S-1334) |
|||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 試驗項目 | ||||||||||||||||||||||
| 方案特點 |
|
|||||||||||||||||||||
| 試驗應用及預期成果 |
|
|||||||||||||||||||||
| 附加方案資料 | Self-driving Golf Ball Picking Robot Solution.docx | |||||||||||||||||||||
| 方案提供者資料 |
|
有關上述創新科技解決方案的詳情,請聯絡方案提供者查詢。