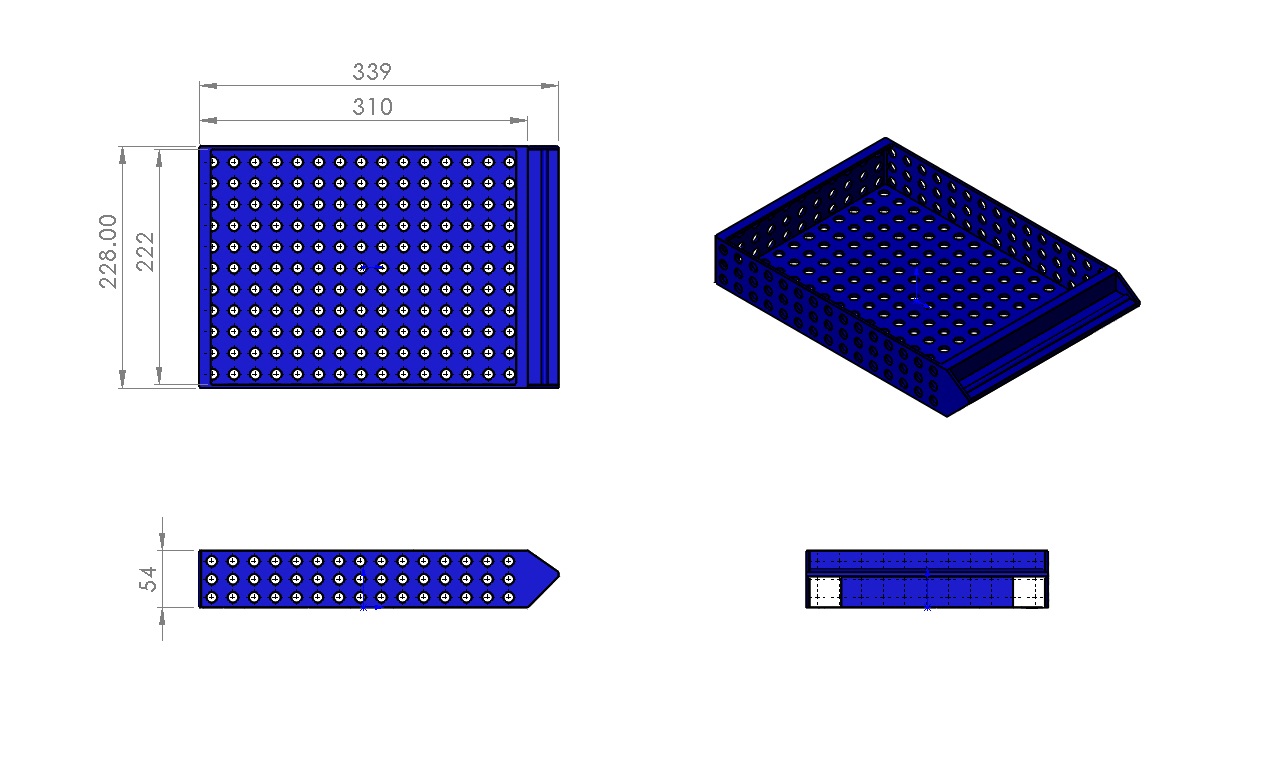
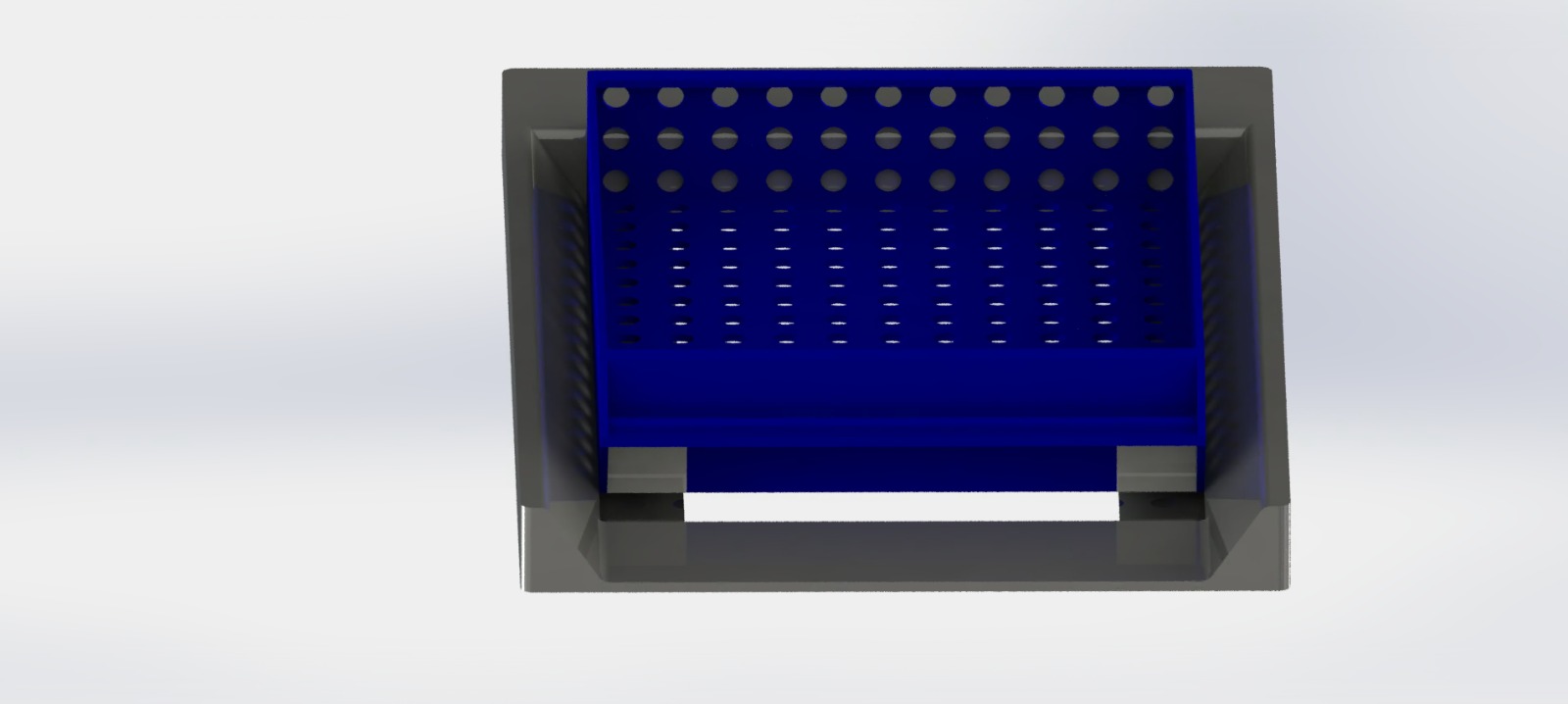
End effector of robotic arm for documentation pick & place
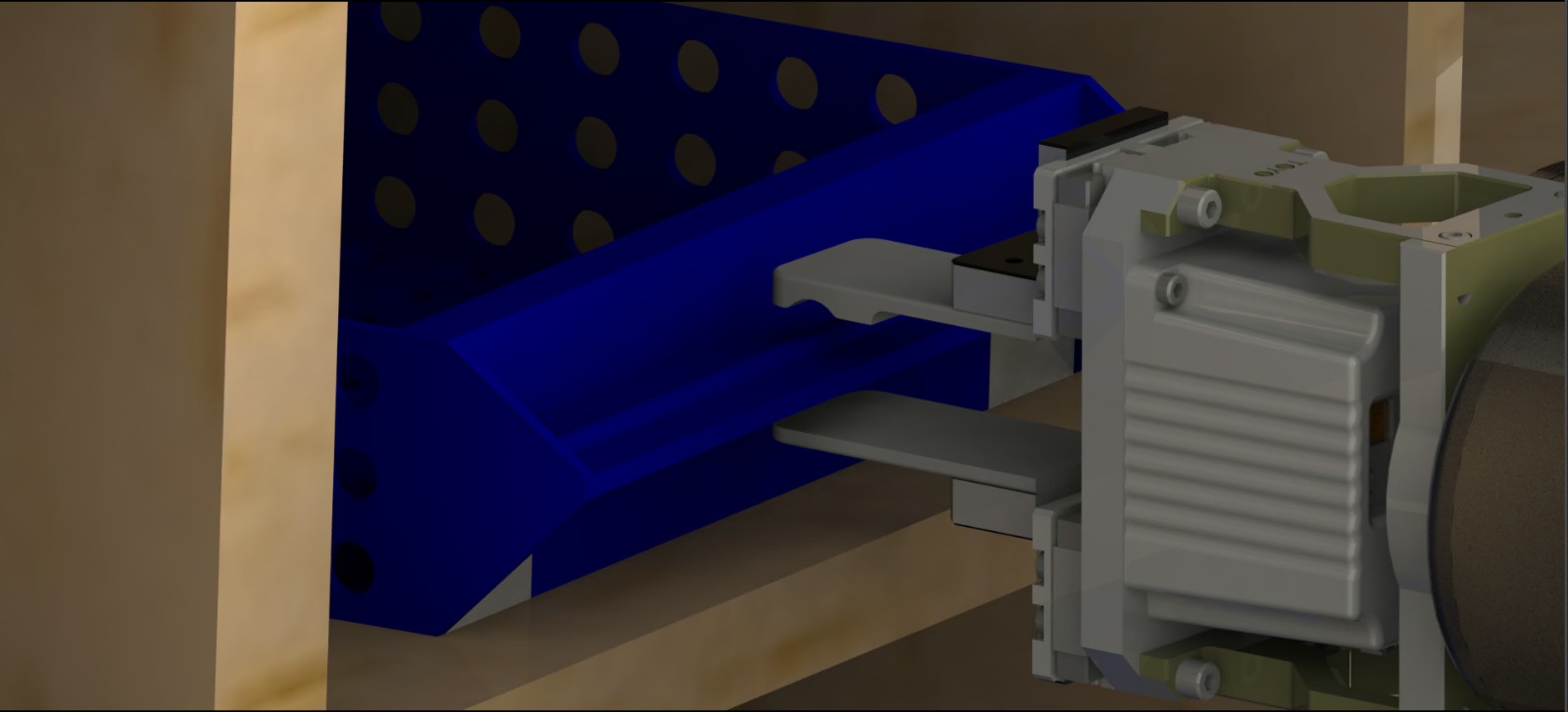
| I&T Solution | End effector of robotic arm for documentation pick & place (REF: S-0861) |
|||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Trial Project | ||||||||||||||||||||||
| Solution Feature |

|
|||||||||||||||||||||
| Trial Application and Expected Outcome |
|
|||||||||||||||||||||
| Additional Solution Information | proposal-emsd-W0339-v1.0.pdf | |||||||||||||||||||||
| Info on I&T Solution Provider |
|
For details of the above I&T solution, please contact the I&T solution provider.