| I&T Solution |
Self-driving Golf Ball Picking Robot Solution
(REF: S-1334) |
| Trial Project |
|
| Solution Feature |
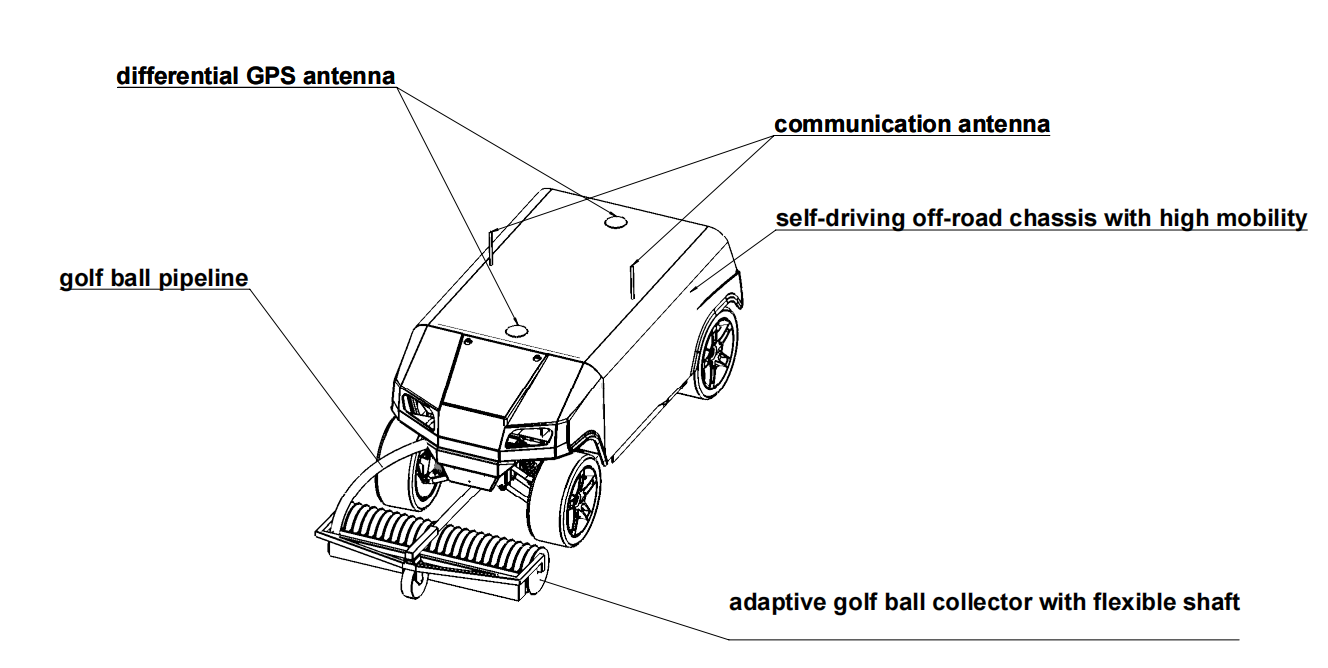
- The collector will deform when encountering the uneven ground to ensure that the golf balls in the depression can be picked up together.
- Equipped with a basic ultrasonic detection radar and a 360° surround view camera as a basic obstacle recognition tool
- The unmanned driving platform can circulate in the field, and the collector can collect the balls on the ground into the car.
- This platform also supports remote control by operators which greatly increase the flexibility of the work.
|
| Trial Application and Expected Outcome |
- The collector will deform when encountering the uneven ground to ensure that the golf balls in the depression can be picked up together.
- Equipped with a basic ultrasonic detection radar and a 360° surround view camera as a basic obstacle recognition tool
- RTK (Real-time dynamic carrier phase difference technology) is used for navigation
|
| Additional Solution Information |
Self-driving Golf Ball Picking Robot Solution.docx
|
| Info on I&T Solution Provider |
| Solution Provider | : | JT- Innovation (Guangdong) Intelligent Technology Co., Ltd | | Address | : | Room 2208, Floor 22, Building 13, Tian'an Center, No. 31 Jihua East Road, Guicheng Street, Nanhai District, Foshan City, Guangdong Province | | Contact Person | : | Guang Li |
| Position | : | project manager | | Tel | : | 18575171856 | | Email | : |
guang.li@jtcx.cn | | Webpage | : | www.jtcx.cn |
|