| I&T Solution |
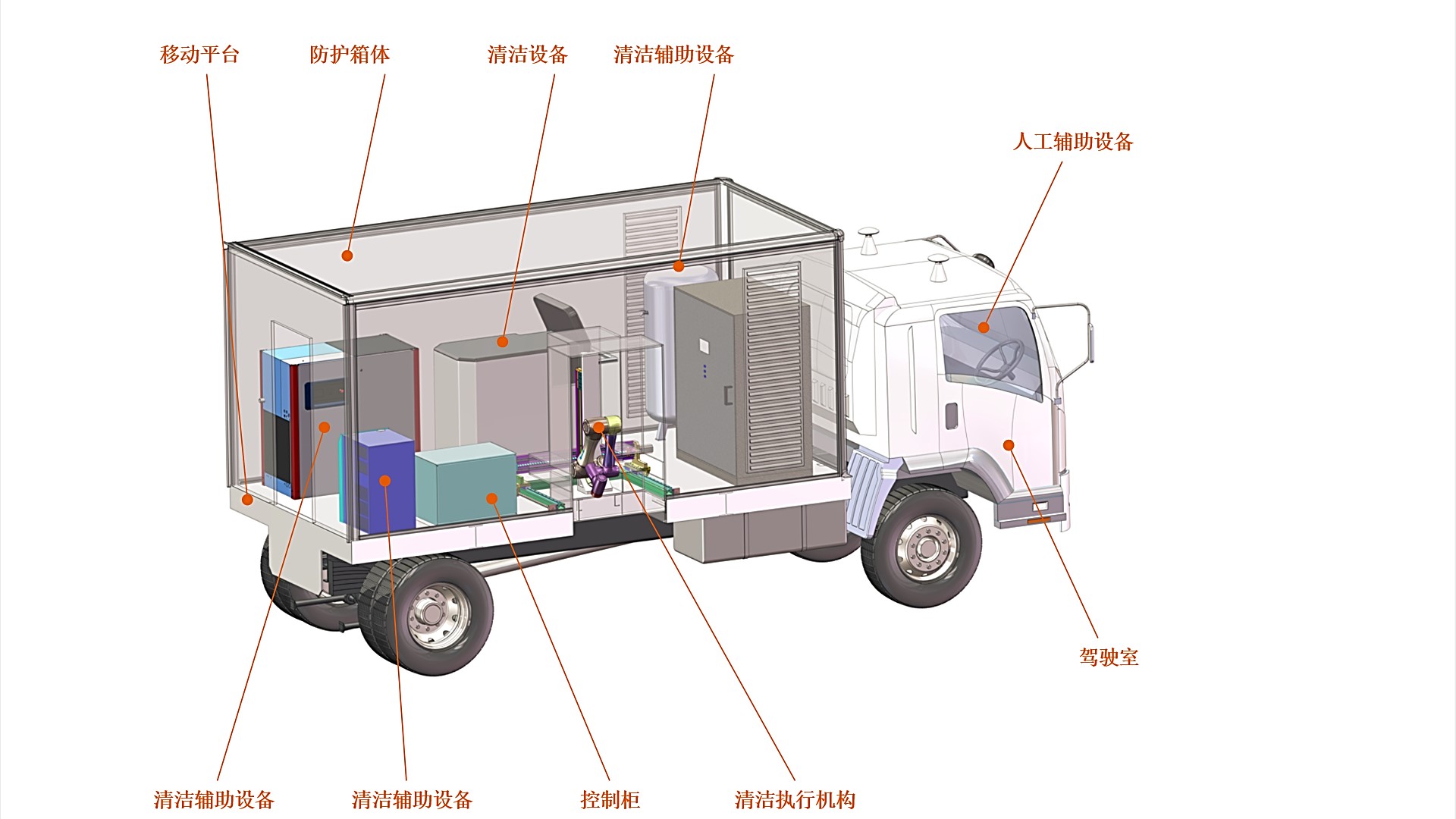
Airfield Ground Lighting (AGL) Cleaning Robot
(REF: S-1350) |
| Matched I&T Wish |
|
| Trial Project |
|
| Solution Feature |
- Adopt multi-sensor data fusion technology, able to navigate with global location-aware and achieve local secondary precise positioning
- Instead of manual labor, clean the runway light fully automatically for efficiency improvement
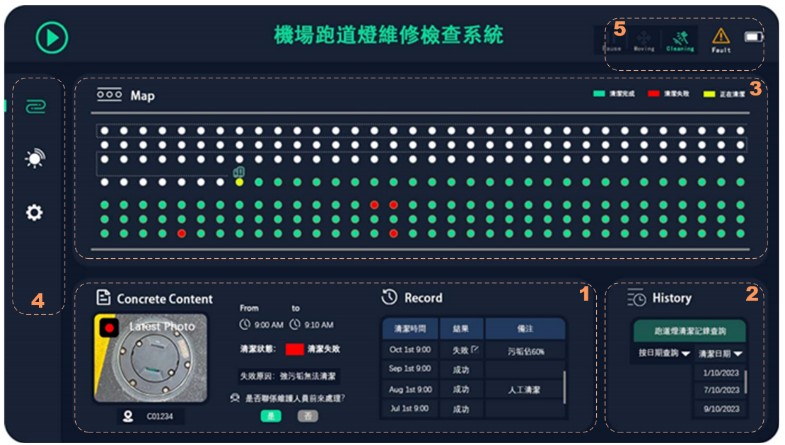
- Provide a unified control system to realize graphical human-machine interaction, data logging query and equipment monitoring
- Easy to operate, expand and maintain with modular design. Provide manual assistance and fully-automatic navigation mode, to deal with normal work and emergency conditions in the airport environment
- By advanced and mature dry ice cleaning process with closed-loop control of robot cleaning operations and results, achieve intelligent optimization of cleaning strategy
|
| Trial Application and Expected Outcome |
- By accurate global positioning and autonomous mobile positioning control technology, track and position the robot, and precisely control the robot movement and docking position
- Under the conditions of illumination and environmental changes, realize the secondary precise positioning and cleaning control technology to complete the cleaning work of AGL
- Optimized technology for fully automated cleaning route planning and cleaning efficiency improvement without manual intervention
- Adopt modular design and integration, data interconnection by each subsystem in the form of communication
- Unified output, display, record light intensity detection data and cleaning data in human-machine interface, provide query and equipment monitoring functions
|
| Info on I&T Solution Provider |
| Solution Provider | : | Zhihao Xu | | Address | : | Building No.13, No.100 courtyard, XIANLIE ZHONGLU Road, YUEXIU district, Guangzhou City | | Contact Person | : | Zhihao Xu |
| Position | : | PhD | | Tel | : | +86 18126712606 | | Email | : |
zh.xu@giim.ac.cn |
|