| I&T Solution |
Crawling Robot-assisted Detection of Corrosion in Pipeline Using Ultrasonic Waves
(REF: S-1581) |
| Trial Project |
|
| Solution Feature |
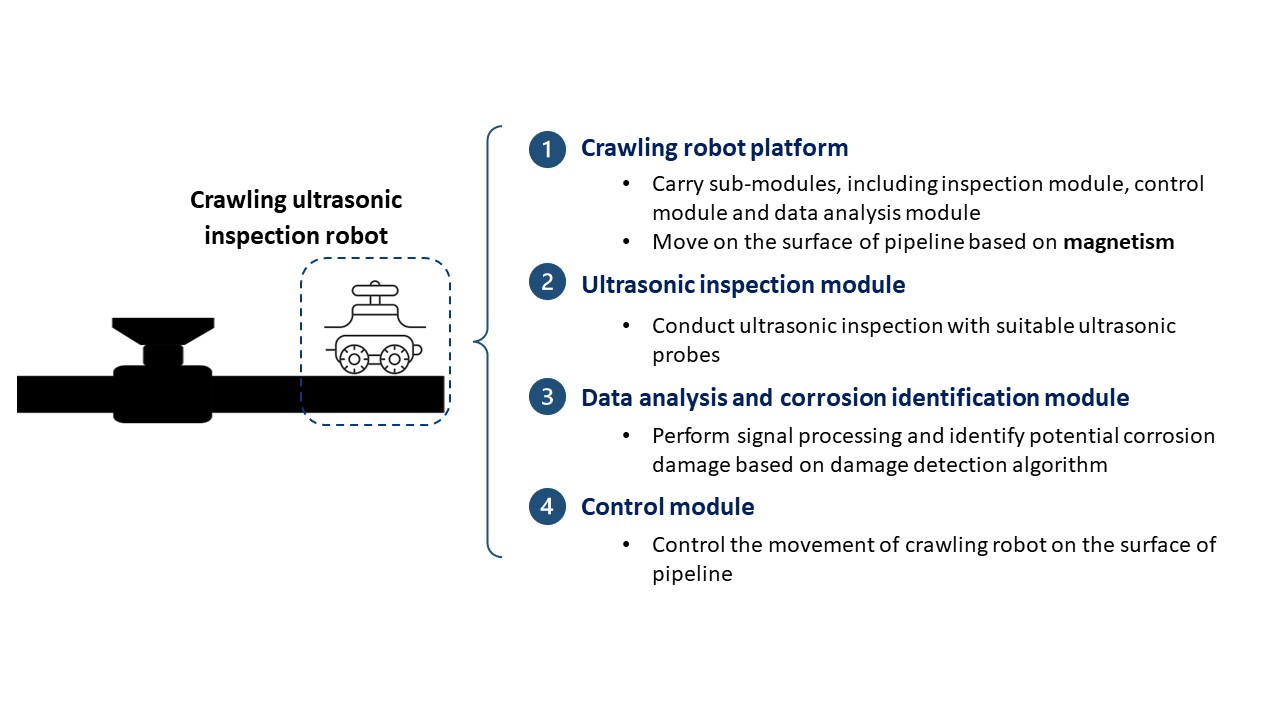
- Develop a magnetism-based crawling robot that can move on the surface of in-service pipeline
- Equip the crawling robot with control module to realize remote control of the move of robot
- Integrate ultrasonic testing module with the crawling robot to perform ultrasonic inspection for corrosion detection
- Develop a data analysis module to conduct ultrasonic signal processing to extract signal features for corrosion identification
- Based on the merits of ultrasonic waves, both surface and interior corrosion damage of pipeline can be detected
|
| Trial Application and Expected Outcome |
- Develop a magnetism-based crawling robot equipped with sub-modules such as control module, ultrasonic inspection module, and data analysis module
- The crawling robot can achieve movement on the surface of in-service pipeline under remote control
- Ultrasonic nondestructive testing is performed by the inspection module during the movement of the crawling robot
- Captured ultrasonic signals will be analyzed based on advanced signal processing techniques to extract signal features for corrosion damage identification
- Carry out on-site testing in in-service pipeline to assess the effectiveness of the developed crawling inspection robot
|
| Additional Solution Information |
Robot-assisted Corrosion Detection of Pipeline Using Ultrasonic Waves.pdf
|
| Info on I&T Solution Provider |
| Solution Provider | : | Hong Kong Productivity Council | | Address | : | HKPC Building, 78 Tat Chee Avenue | | Contact Person | : | Lei Xu |
| Position | : | Postdoctoral Researcher | | Tel | : | 27885058 | | Email | : |
leixu@hkpc.org | | Webpage | : | https://www.hkpc.org/en |
|