| I&T Solution |
Development of Toilet Bowl Cleaning Robot
(REF: S-1697) |
| Matched I&T Wish |
|
| Trial Project |
|
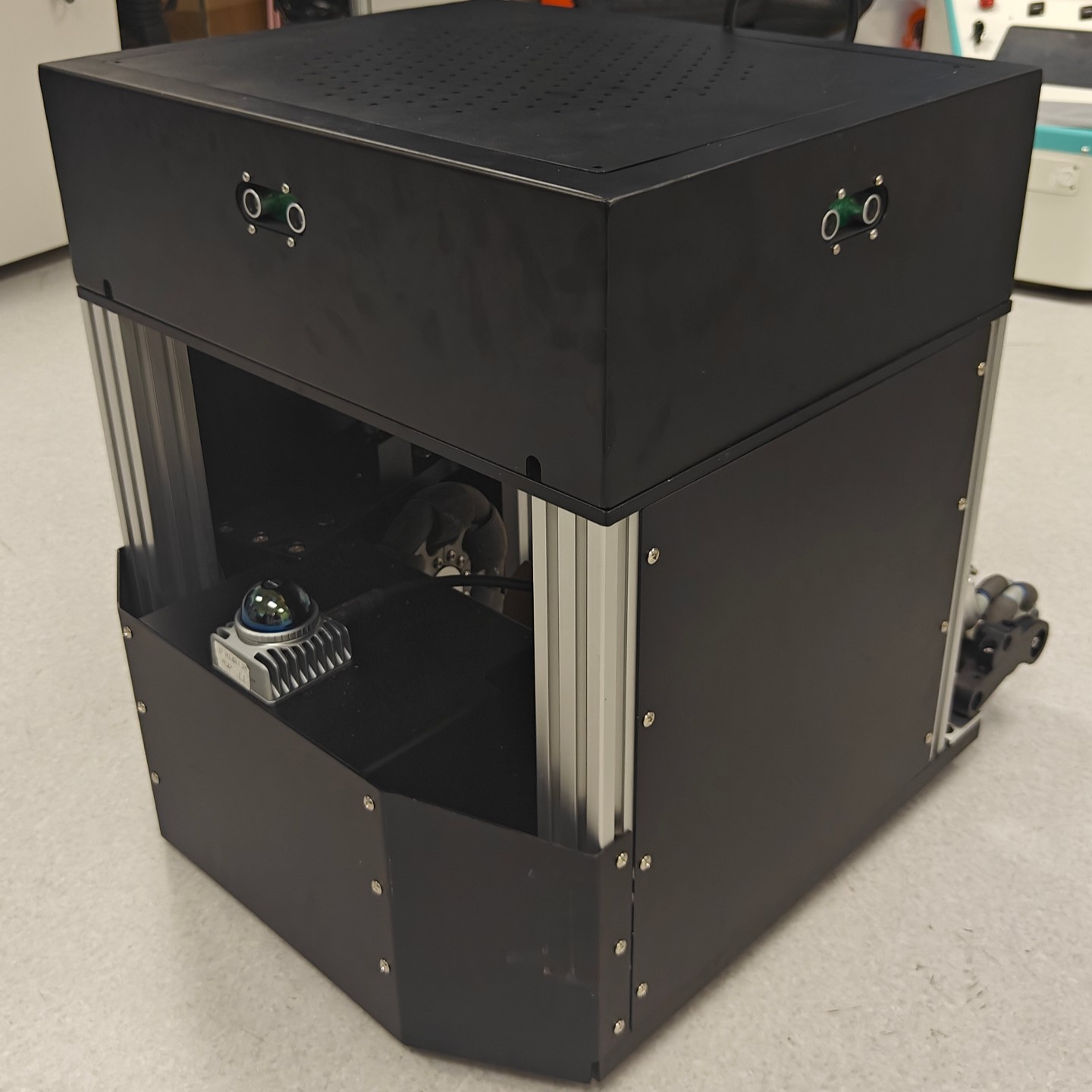
| Solution Feature |
- Omnidirectional mobile chassis with 2 passive omnidirectional wheels and suspensions, allowing for a large load capacity;
- Integrating 3D Lidars for autonomous navigation;
- Developing autonomous navigation software in restrooms without collision, including automatic positioning, planning and control functions;
- Developing obstacle avoidance software;
- Developing control algorithm for aligning with automatic charging stations.
|
| Trial Application and Expected Outcome |
- A omnidirectional mobile platform equipped with 3D Lidars, IMU and wheel encoder sensors for autonomous navigation;
- Robot software for autonomous navigation and positioning;
- Equipped with autonomous charging hardware and control software;
- Providing software and hardware interfaces with the existing cleaning platform;
- Demonstrations of navigation and positioning in the restrooms.
|
| Info on I&T Solution Provider |
| Solution Provider | : | Prof. Ning XI | | Address | : | Room 8-05, 8/F. Haking Wong Building, The University of Hong Kong, Pokfulam Road, HK | | Contact Person | : | Ning XI |
| Position | : | Chair Professor of Robotics and Automation | | Tel | : | 3917 2593 | | Email | : |
xining@hku.hk | | Webpage | : | https://www.imse.hku.hk/people/n-xi |
|