| I&T Solution |
Robotics Solution for Cleaning Works in Public Transport Interchange
(REF: S-1809) |
| Trial Project |
|
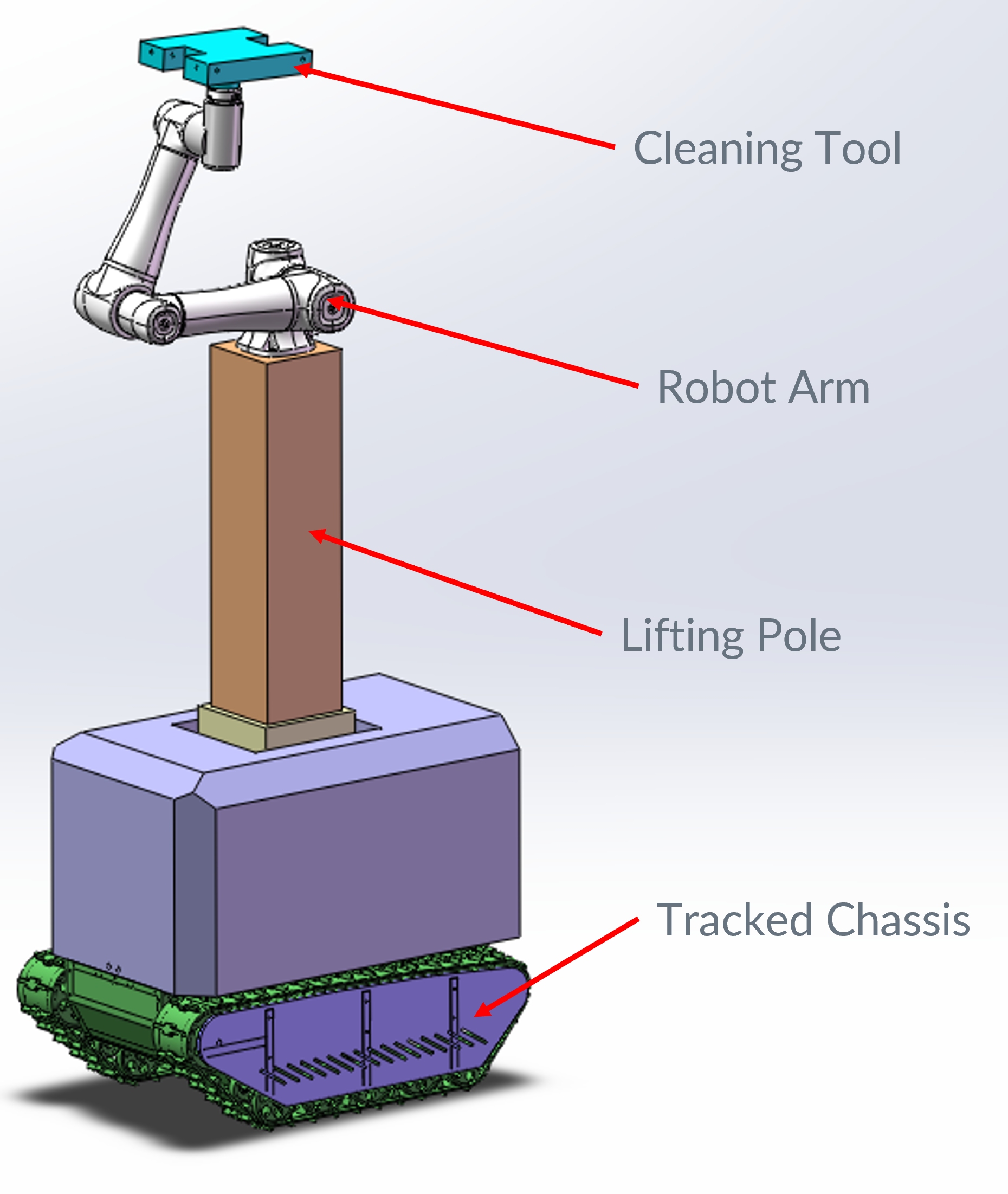
| Solution Feature |
- Track-based Robot Chassis Design capable for rough terrain
- Lifting Pole Adoption for high level working
- Wireless Remote Control for replacing workers working at high level
- Robot Arm Adoption for Angle Adjustment for Cleaning Tools
- Modular design of cleaning tools and interchangeable
|
| Trial Application and Expected Outcome |
- Design a Robot loading with all mechanical components including Lifting Pole, Robot Arm and cleaning tools
- Develop a convenient control interface for Robot Chassis Movement and Lifting Pole
- Effective Communication between Chassis and Robot Arm
- Programmable Robot Arm Operations for performing several cleaning tasks
- Easy installation and replacement for cleaning tools attached to Robot Arm
|
| Additional Solution Information |
PTI_Cleaning_Robot_R1c.pdf
|
| Info on I&T Solution Provider |
| Solution Provider | : | Karmo International Co. Ltd. | | Address | : | Unit 252, 2/F, Building 12W, Hong Kong Science Park, Sha Tin, NT | | Contact Person | : | LAU Ping Hong |
| Position | : | Director | | Tel | : | 9184 4699 | | Email | : |
nelson.lau@karmo.com.hk | | Webpage | : | www.karmo.com.hk |
|