| I&T Solution |
Historical Buildings Defect Detection (Structural Integrity Inspection and Maintenance Robot)
(REF: S-1878) |
| Matched I&T Wish |
|
| Trial Project |
|
| Solution Feature |
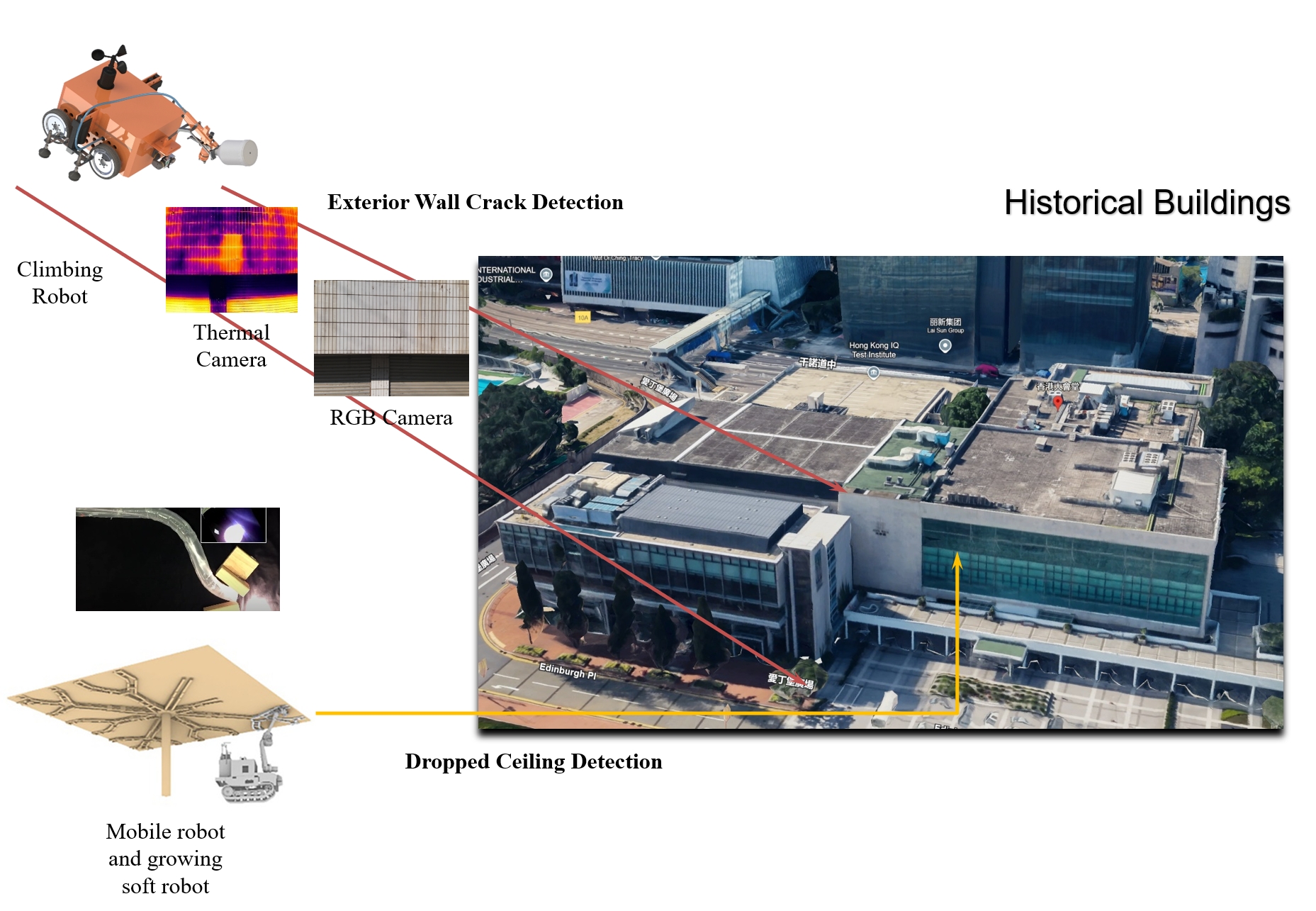
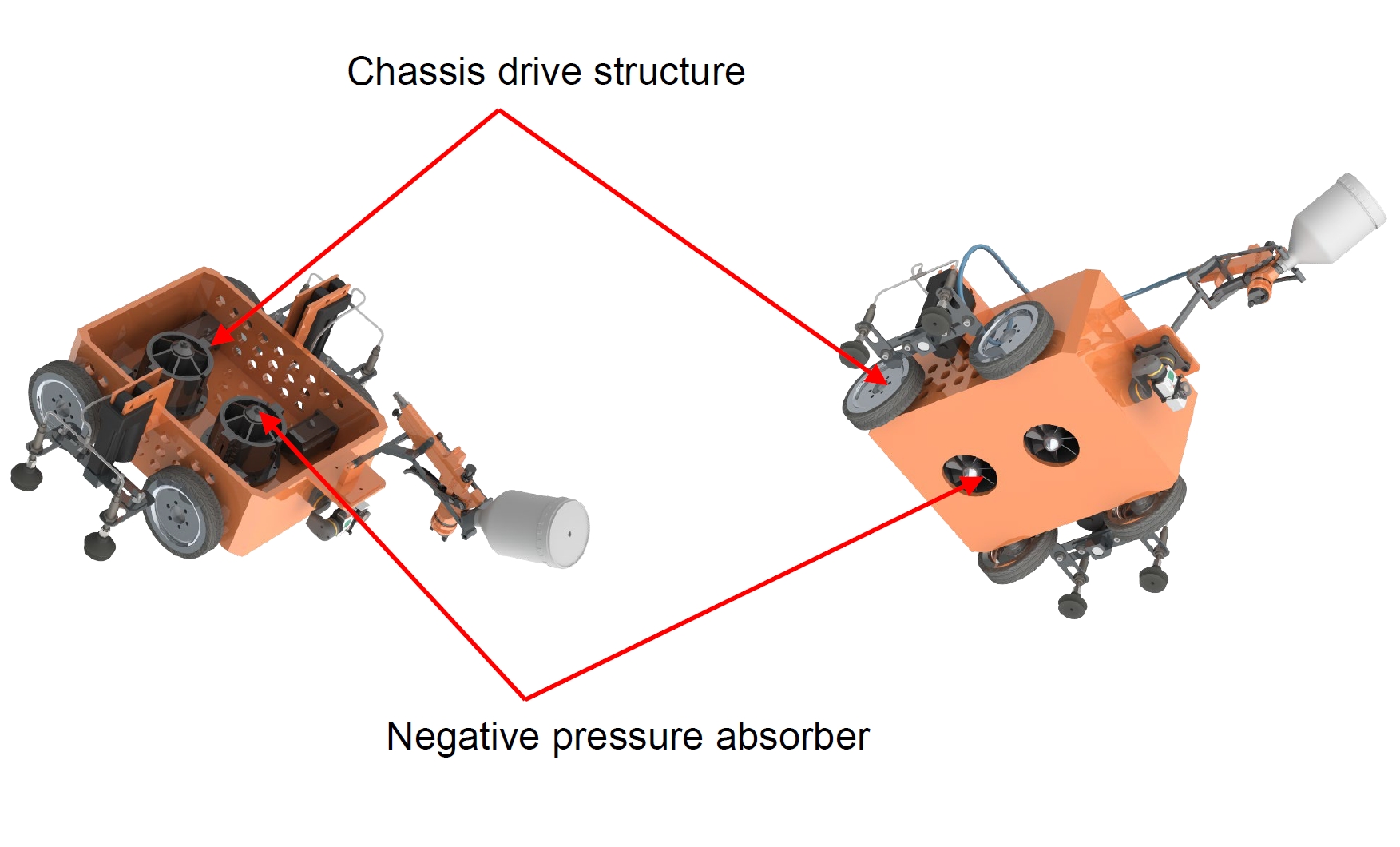
- The climbing robot autonomously operates on various exterior wall structures, detecting leaks, cracks, and structural defects, generating high-precision inspection reports.
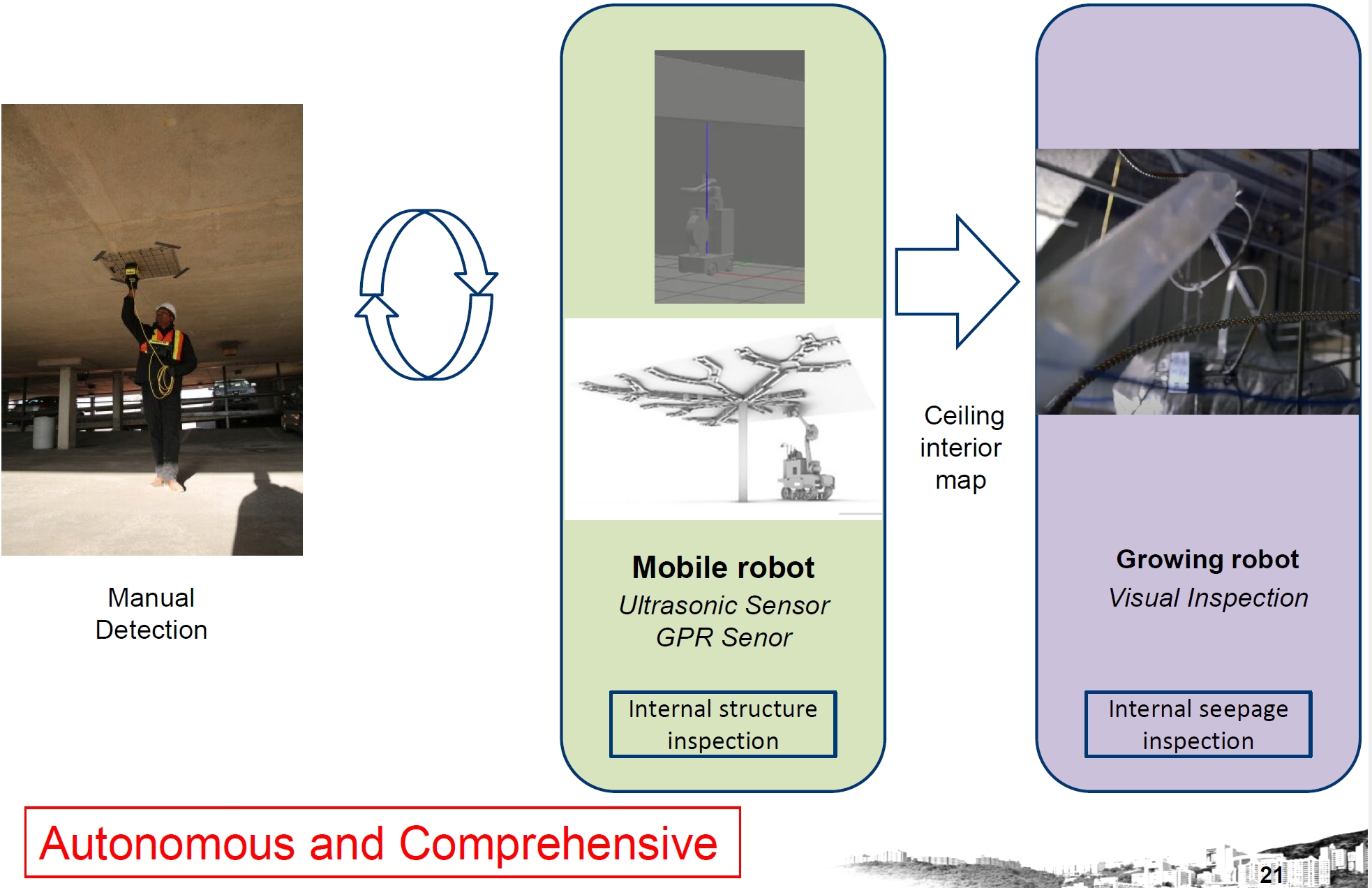
- The mobile robot equipped with GPR and ultrasonic technology accurately detects material structures in internal false ceilings and provides detailed mapping information.
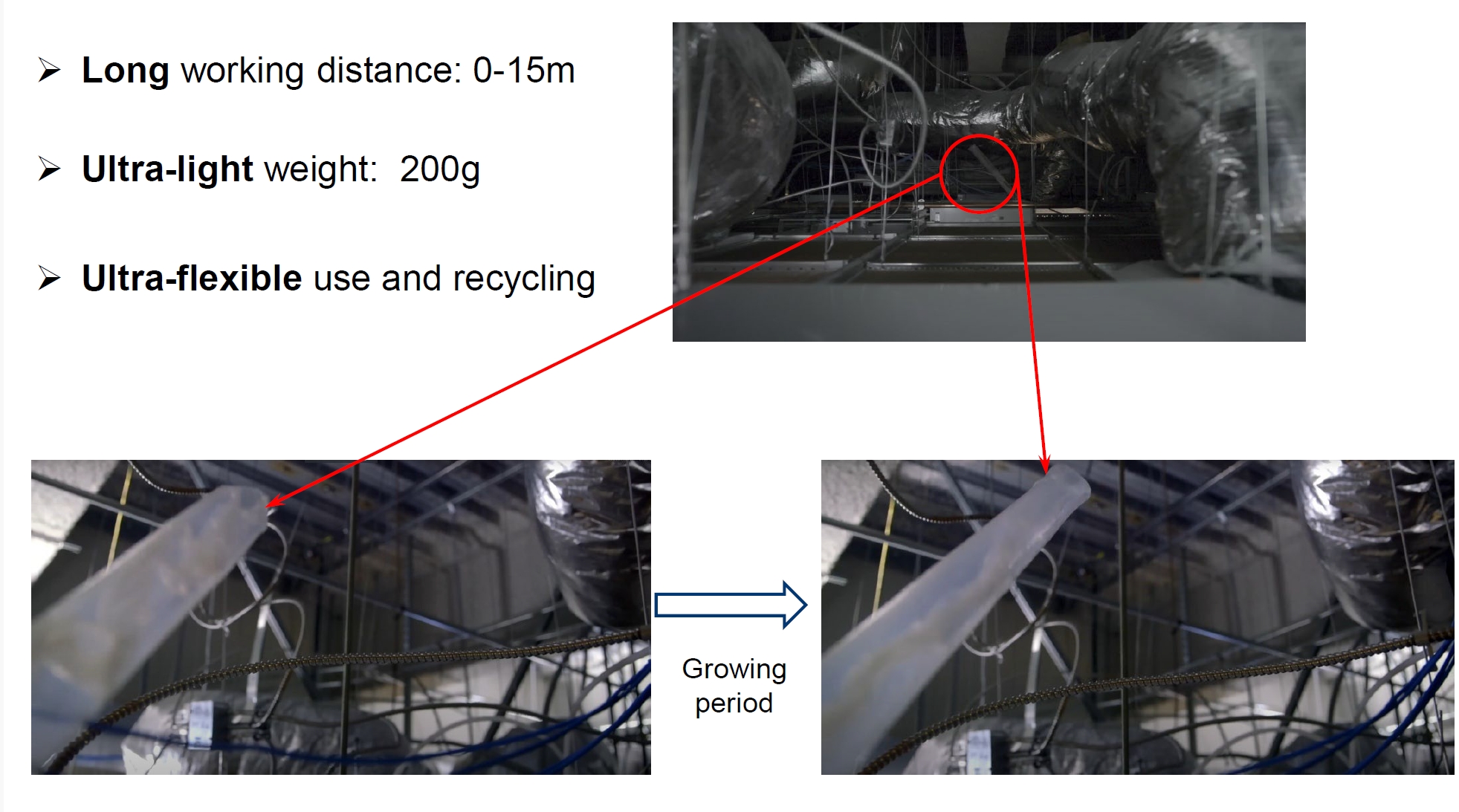
- The soft growing robot uses the mobile robot’s mapping data for internal visual inspection, identifying hidden cracks, corrosion, and other anomalies.
- Real-time data synchronization ensures precise data sharing during inspections, enabling immediate report generation and speeding up maintenance response.
- The system’s modular design is flexible, allowing for scalability to support inspection tasks for various areas of buildings based on specific needs.
|
| Trial Application and Expected Outcome |
- The climbing robot improves exterior wall inspection efficiency, accurately identifying leaks and defects over 50cm thick walls, providing data support and reducing costs.
- The mobile robot uses GPR and ultrasonic technology to provide high-precision internal data for false ceilings between 0.5m-2m, quickly identifying anomalies.
- The soft growing robot conducts internal inspections based on mapping, improving detection of hidden anomalies, supporting autonomous inspection.
- Real-time data synchronization and report generation accelerate result generation, aiding quick decisions and reducing response time.
- The system is flexible and scalable, supporting various areas of buildings, providing efficient and comprehensive inspection services for diverse scenarios.
|
| Additional Solution Information |
Prof. Wang_zhe.pdf
|
| Info on I&T Solution Provider |
|