| I&T Solution |
Development of Autonomous Robot for Body Transportation in Mortuary Building
(REF: S-1851) |
| Trial Project |
|
| Solution Feature |
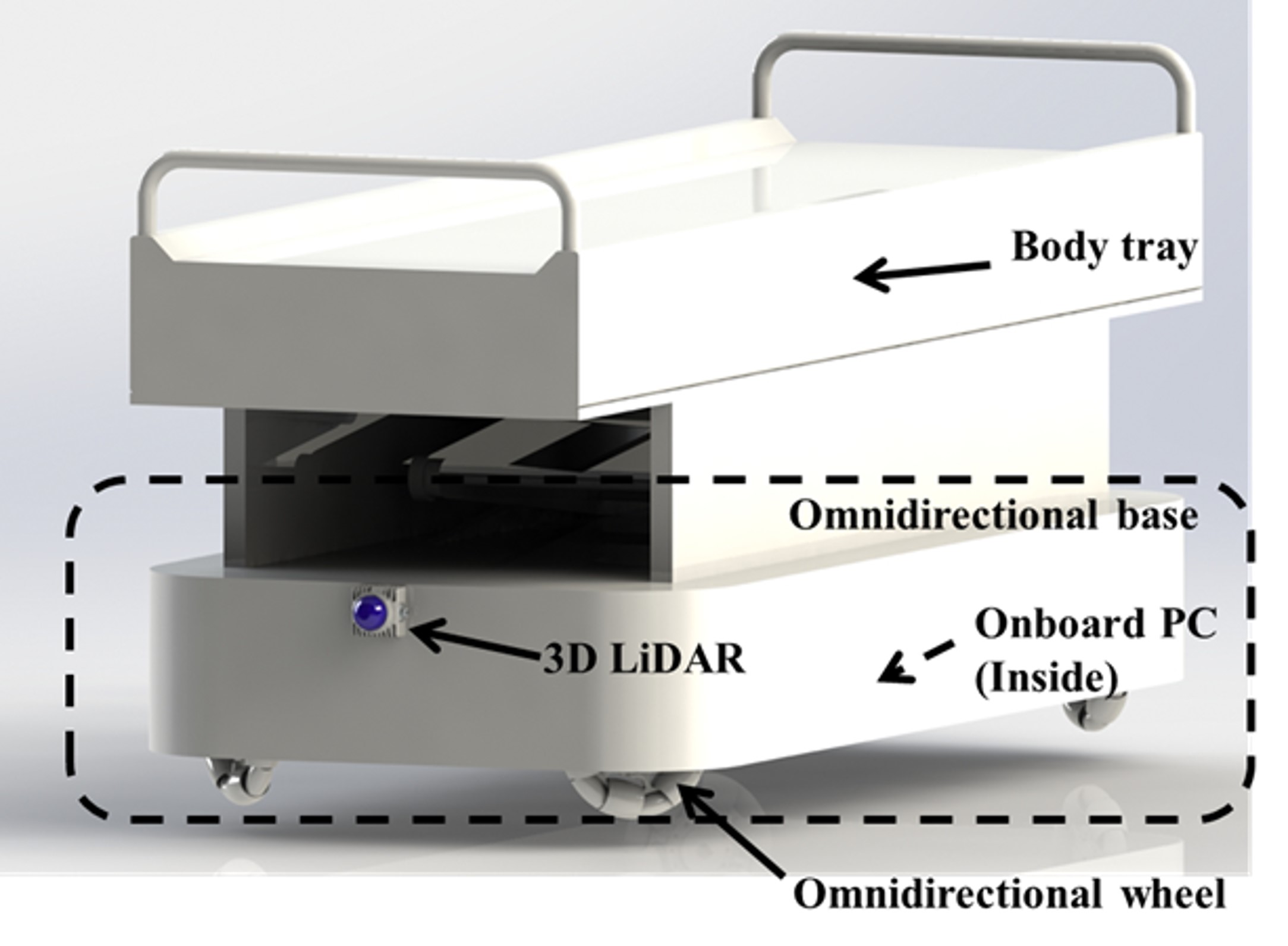
- Omnidirectional mobility, 4 Degree-of-Freedom (4 DoF) positioning body tray and automatically loading/unloading for autonomous body transportation within the mortuary building.
- Patented non-vector space positioning and navigation for autonomous motion and obstacle avoidance.
- Patented event-based control for autonomous operations.
- Patented tele-robotic control protocol(TRCP)enabled real-time remote monitoring operation and teleoperation in unexpected situations to ensure a reliable and safe operations.
|
| Trial Application and Expected Outcome |
- Test the body transportation robot at the EMSD designated sites.
- Evaluate the performance of the body transportation robot on all required functions.
- Demonstrate the robot operations and user interface.
- Expected Outcomes: 1. Successful completion of all required robot functions. 2.Remote monitoring the robot operations and teleoperation to deal with unexpected events. 3.Unser friendly user interface.
- Documentation of the robot design, testing and evaluations.
|
| Additional Solution Information |
Development of Autonomous Robot for Body Transportation in Mortuary Building_HKU.pdf
|
| Info on I&T Solution Provider |
| Solution Provider | : | Ning, Xi | | Address | : | Rm 820, Haking Wong Building, The University of Hong Kong, Pokfulam, Hong Kong | | Contact Person | : | Tracy Tsoi |
| Position | : | Executive Officer | | Tel | : | 39178339 | | Email | : |
etitracy@hku.hk | | Webpage | : | https://ati.hku.hk/ |
|