| I&T Solution |
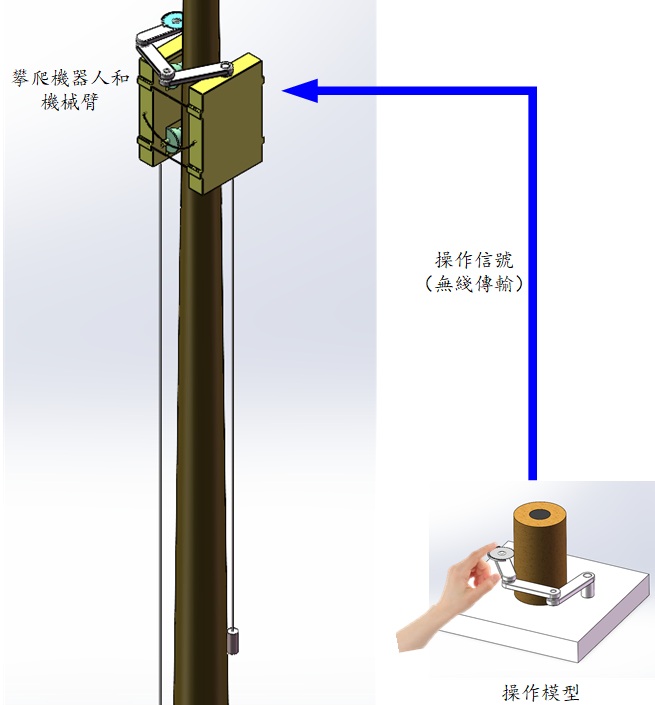
Palm Tree Climbing Robot with Dead Leaf Pruning Arm
(REF: S-1973) |
| Trial Project |
|
| Solution Feature |
- Climbing system adapts to irregular trunks with posture correction and synchronized motion.
- Multi-joint robotic arm uses master-slave control for intuitive 360° pruning operations.
- Multiple safety features include gravity switch, backup ropes, self-locking and manual retrieval.
- Supports trunk diameters of 150–400mm; weighs under 35kg for outdoor deployment.
- Reduces high-risk manual labor, improves pruning efficiency and enables field-ready performance.
|
| Trial Application and Expected Outcome |
- Build and integrate the prototype to validate basic functions and technical feasibility.
- Use simulated trunks to test climbing and pruning workflows for stability and reliability.
- Conduct failure scenario tests to ensure safety and manual retrieval systems work effectively.
- Test the master-slave control system and arm precision to ensure intuitive and responsive pruning operation.
- Run field demonstrations and user trials to optimize the system for deployment readiness.
|
| Additional Solution Information |
(可公開)棕櫚樹攀爬機器人和枯葉修剪機械臂.pdf
|
| Info on I&T Solution Provider |
| Solution Provider | : | Hangzhou Fuya Science and Technology Co., Ltd. | | Address | : | Room 202, Building A, No. 79 Jinyi Road, Economic and Technological Development Zone, Ningwei Street, Xiaoshan District, Hangzhou City, Zhejiang Province, China | | Contact Person | : | Xin LI |
| Position | : | CEO | | Tel | : | +86-15868873839 | | Email | : |
vortexdoctor@zju.edu.cn |
|