| I&T Solution |
Logistic IOT Robot
(REF: S-0578) |
| Trial Project |
|
| Solution Feature |
- The proposed robot is used for document picking and delivering in the office environment, which is fully autonomous and capable of intelligent task management.
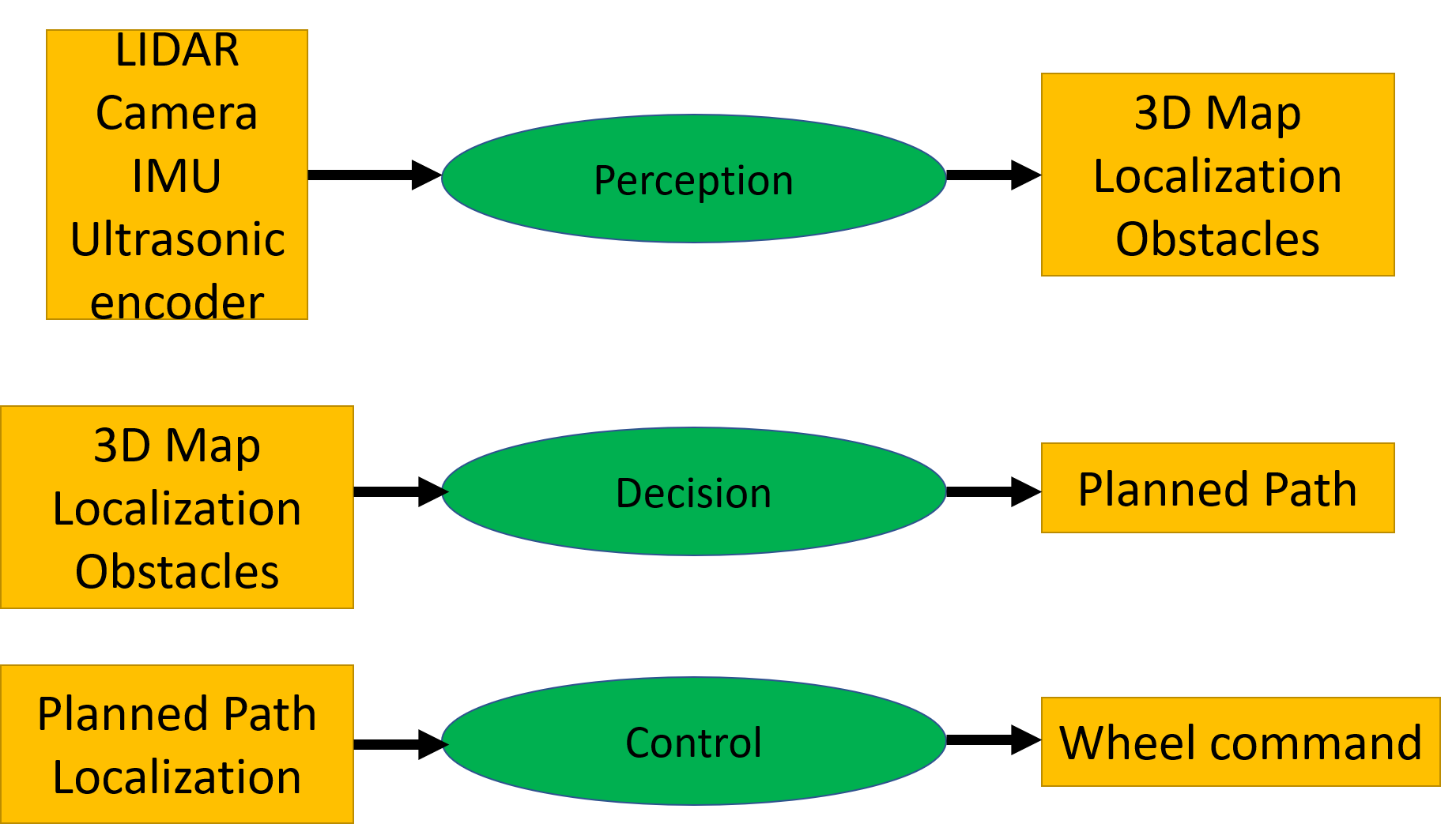
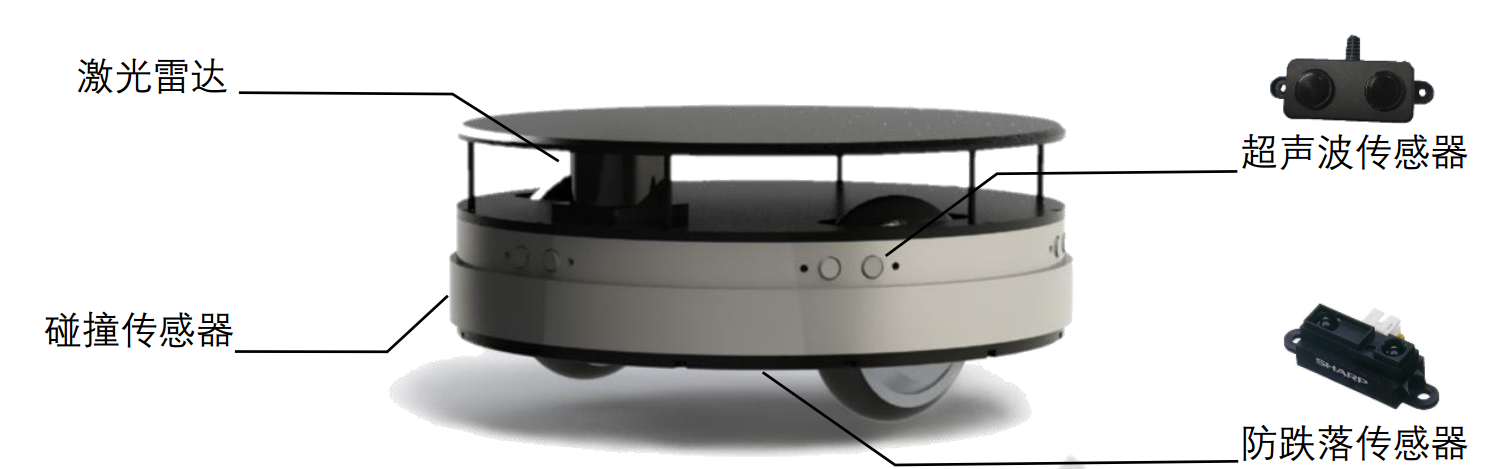
- Navigation: The navigation model can work in complicated indoor scenario, whose task is consisted of localization, mapping, obstacle avoidance, and path planning. 3D Lidar is the main sensor, and several other sensors like ultrasonic sensors will be used to augment safety.
- Shelf interaction: The robot will use the camera to scan the QR codes on the document shelf for identifying the accurate box layer position. It has a foldable forklift to take and send the box from and to the shelf.
- User interface: We will develop the user interface for clients to use the robot delivery service. A website based on the local network will take over the sender-receiver management, task priority, scheduling for inter-office & intra-office, etc.
- Hardware integration: The robot platform is consisted of moving chassis, battery, perception sensor, box forklift. We will design an optimal hardware structure for robot performance and good-looking. The robot will support the automatic charging function. It will go to the fixed-positioned charge ports automatically when the battery is low.
|
| Trial Application and Expected Outcome |
- The effectiveness of the proposed robot can be verified by testing it in indoor scenarios, such as delivering documents in companies or universities. Several metrics like localization accuracy and delivery efficiency can be used to evaluate the performance of the robot.
- We will first build the office structural 3D map with the Lidar and lidar-based SLAM. Then we use the ICP algorithm to match the lidar current measurement with the pre-built map to locate the robot position. The localization error is expected to be less than 1cm.
- To realize shelf interaction, we will attach QR codes to each layer of the shelf, so that the accurate position of the target document can be obtained by scanning corresponding QR codes.
- We will build a website for user interaction based on local network. For front end, we will consider aesthetics design, user experience, etc. For back end, we will realize basic functions like priority ranking in stage 1, and more complex functions like inter-office & intra-office in later stage.
- We will deploy multiple charging ports in the office and label them in the pre-built 3D map. When the battery of the robot is low, the robot will automatically navigate to one charging port and will continue its interrupted work after being fully charged.
|
| Info on I&T Solution Provider |
| Solution Provider | : | the Hong Kong University of Science and Technology | | Address | : | Clear Water Bay, Kowloon, Hong Kong | | Contact Person | : | Ming Liu |
| Position | : | Assistant professor | | Tel | : | (852) 2358 7058 | | Email | : |
eelium@ust.hk | | Webpage | : | https://ram-lab.com/ |
|