| I&T Solution |
Robot Arm for Sorting Flats / Packets
(REF: S-0562) |
| Trial Project |
|
| Solution Feature |
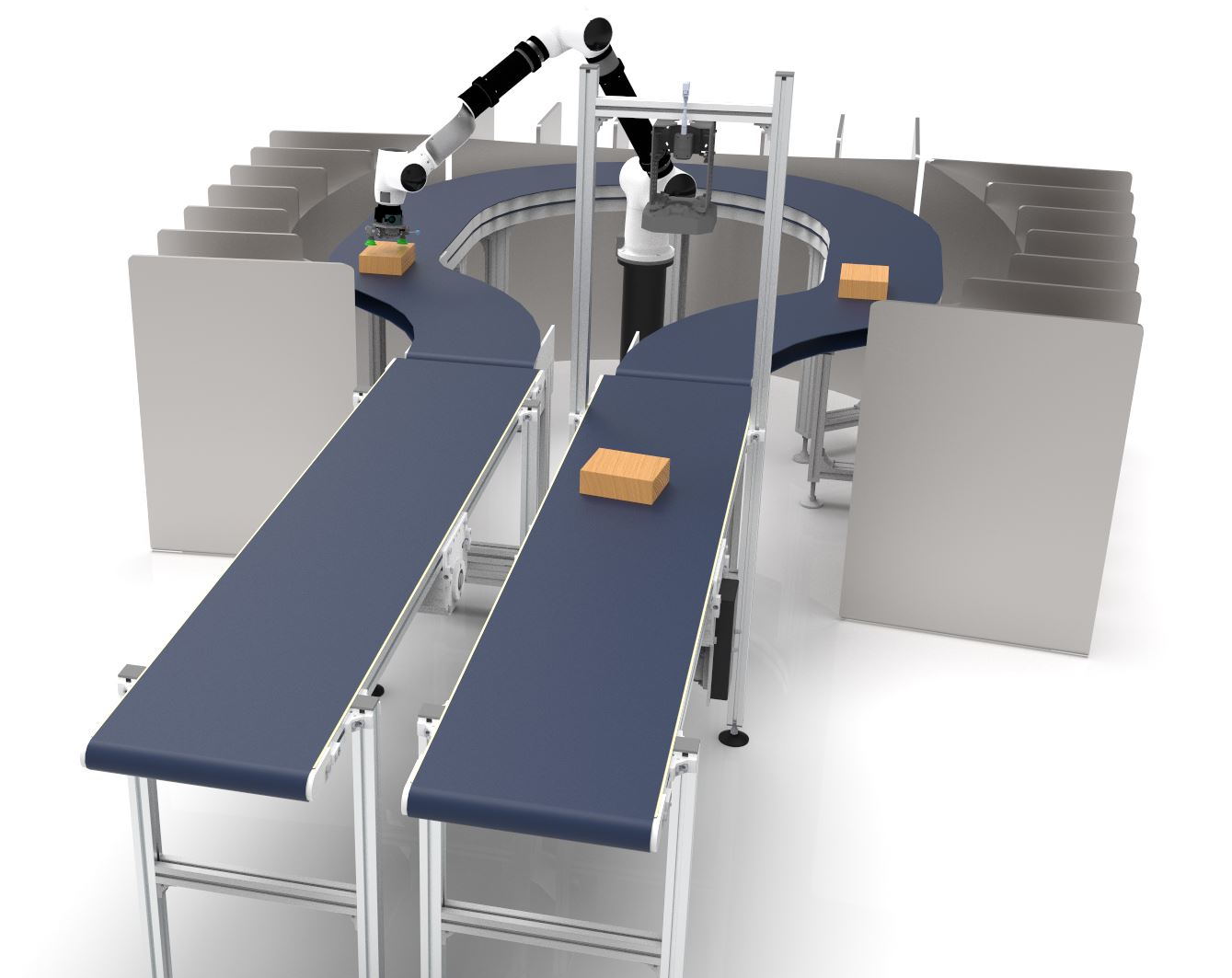
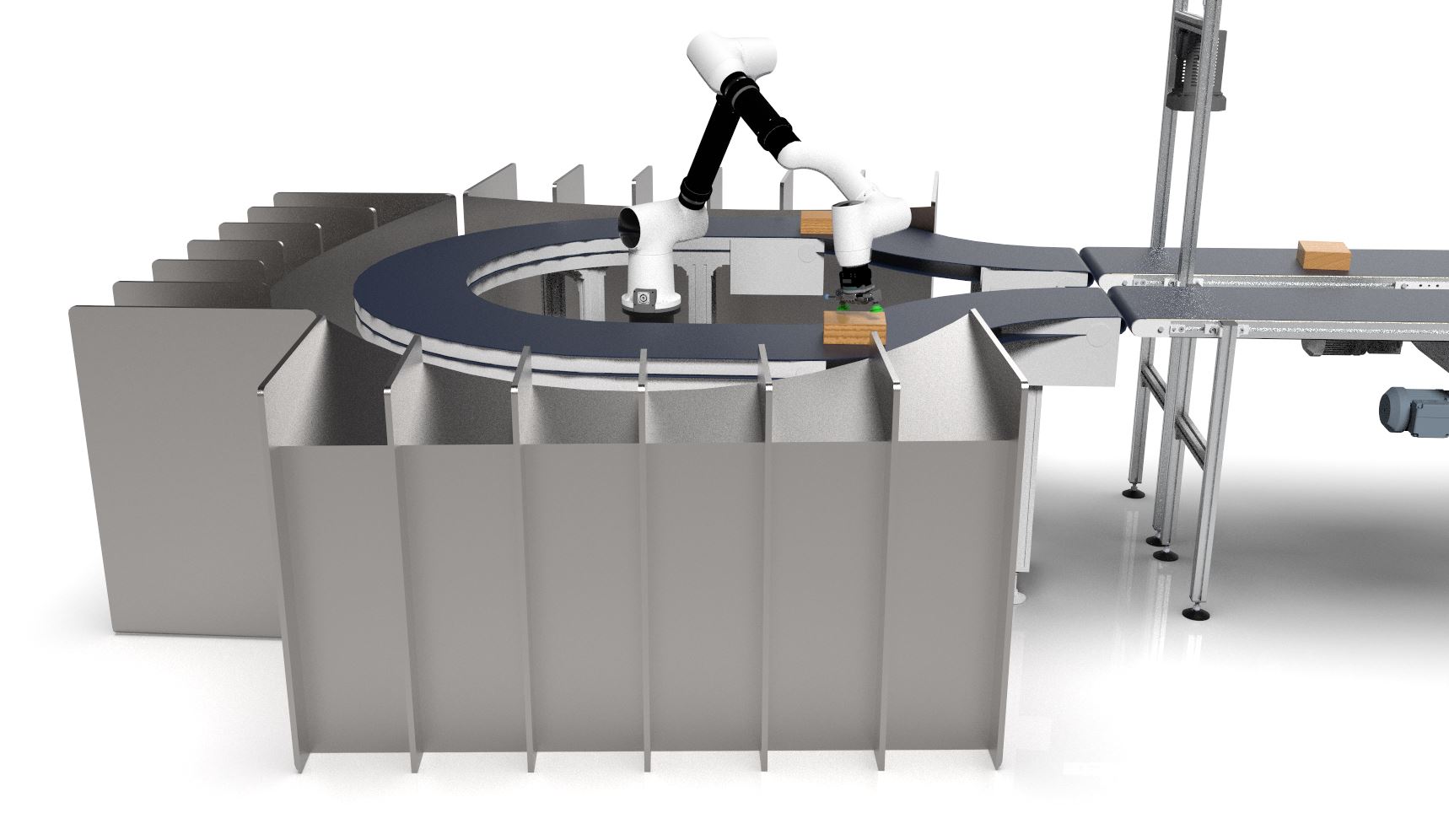
- A robot solution for sorting parcels and mail
- Upon identification of the QR code, a camera with a vision-based algorithm that identifies the parcel associated with the QR code. The algorithm also deduces various geometric parameters of the parcel, such as size, shape, orientation, and centroid.
- Based on the geometric parameters of the parcel, a robotic arm with suction cups at its end-effector picks up the parcel and places it in the appropriate tray. If no QR code is identified, the robotic arm does not handle the parcel.
- A vision-based scanner identifies and reads a QR code on the incoming parcel riding on a conveyor belt.
|
| Trial Application and Expected Outcome |
- We can perform a trial run of the vision-based QR code scanner and determine its accuracy and speed in reading the QR code on a moving conveyor belt under various lighting conditions and orientations.
- We can perform a trial run using a camera with a vision-based algorithm to determine how accurate and speed it identifies a parcel and estimates its various geometric parameters. The trial run is performed with the parcel of various shapes and sizes on a moving conveyor belt.
- We can perform a trial run using the robotic arm to track and pick up a parcel on a moving conveyor belt based on its geometric parameters. The trial run also includes the suction cups’ ability to securely attach to parcels made of a variety of material.
- We can perform a trial run using the robotic arm to test its ability to place the parcel into the appropriate tray in possibility a semi-circular layout.
- We can perform a trial run of the aforementioned sub-systems as a whole. We can evaluate the reliability of the sub-systems working together and ultimately the speed when compared to a human worker.
|
| Info on I&T Solution Provider |
|