| I&T Solution |
Motorcycles counting solution by LiDAR
(REF: S-0727) |
| Trial Project |
|
| Solution Feature |
- This proof-of-concept project aims to investigate the potential of LiDAR sensors-based motorcycle parking space occupancy detection system. Performance evaluation involves accuracy, robustness, latency, and reliability. The system shall interact with external information management systems in wireless manner so that it falls under the umbrella of the Internet-of-Thing (IoT) solution.
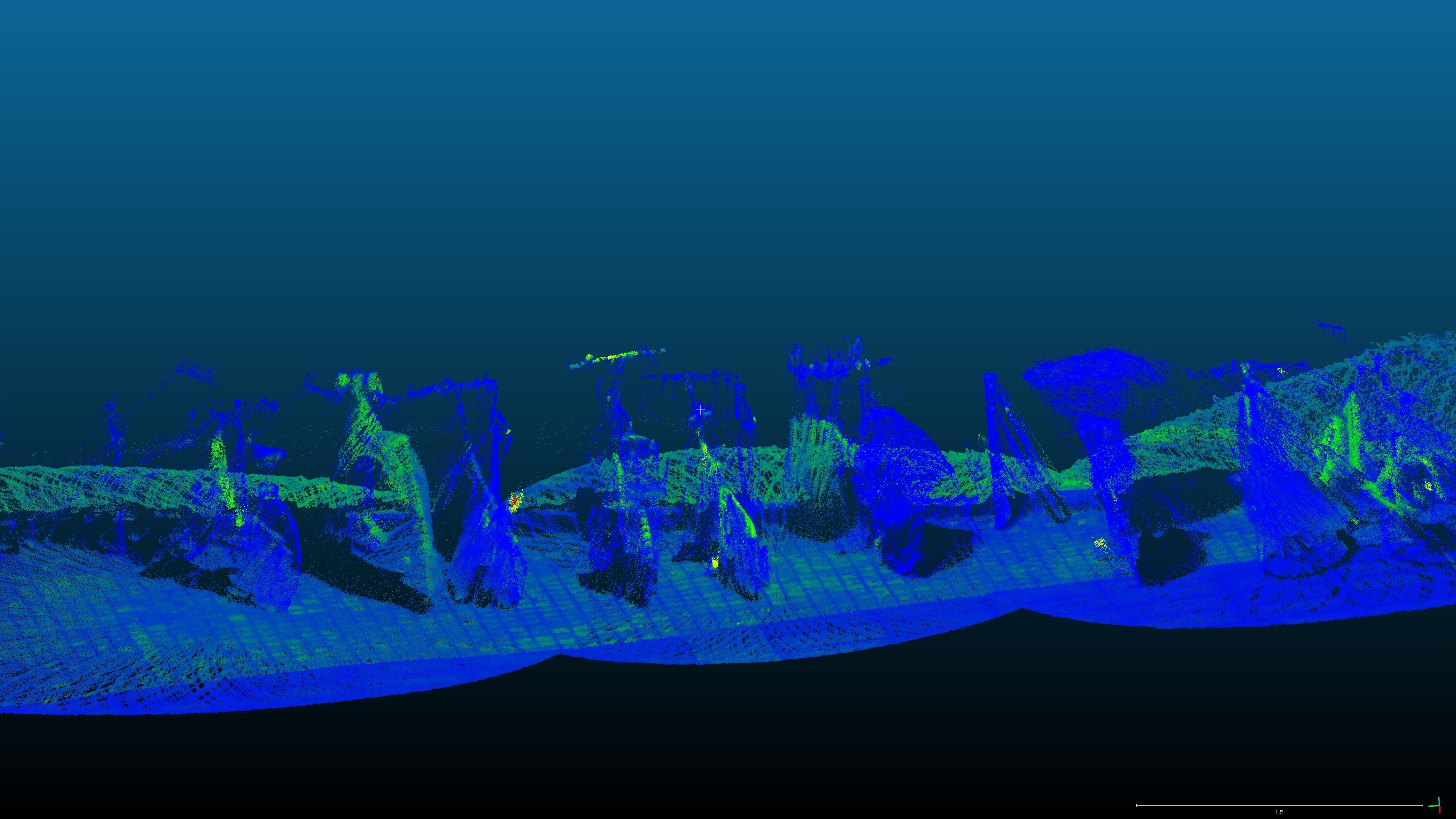
- LiDAR sensors measure distance by beaming the target with infrared laser and using a wavelength-sensitive sensor. The output is a stream of 3D coordinate points (point-cloud) with attributes include reflection intensity and timestamp. It can operate in darkness without capturing the drivers’ or passerby’s facial details.
- Video-based surveillance cameras have disadvantages of capturing the drivers’ or passerby’s facial details. This poses security threats because facial recognition could determine the personal identity. Thermal imaging captures the heat map of the surroundings and irrelevant information such as heat distribution and visual features.
- Radar and ultrasound sensors suffer from poor structural resolution and precision in nature due to their wavelength band adopted. They cannot clearly distinguish a cartoon box from a motorcycle and the interference from the surrounding is severe in most ordinary car park environment.
- A LiDAR based smart car park system would only gather necessary and sufficient information to notify visiting motorcyclists whether parking spaces are available at any instant. From our previous project experience, LiDAR is capable of capturing and distinguishing motorcycles, with/without rain cover, from other objects.

|
| Trial Application and Expected Outcome |
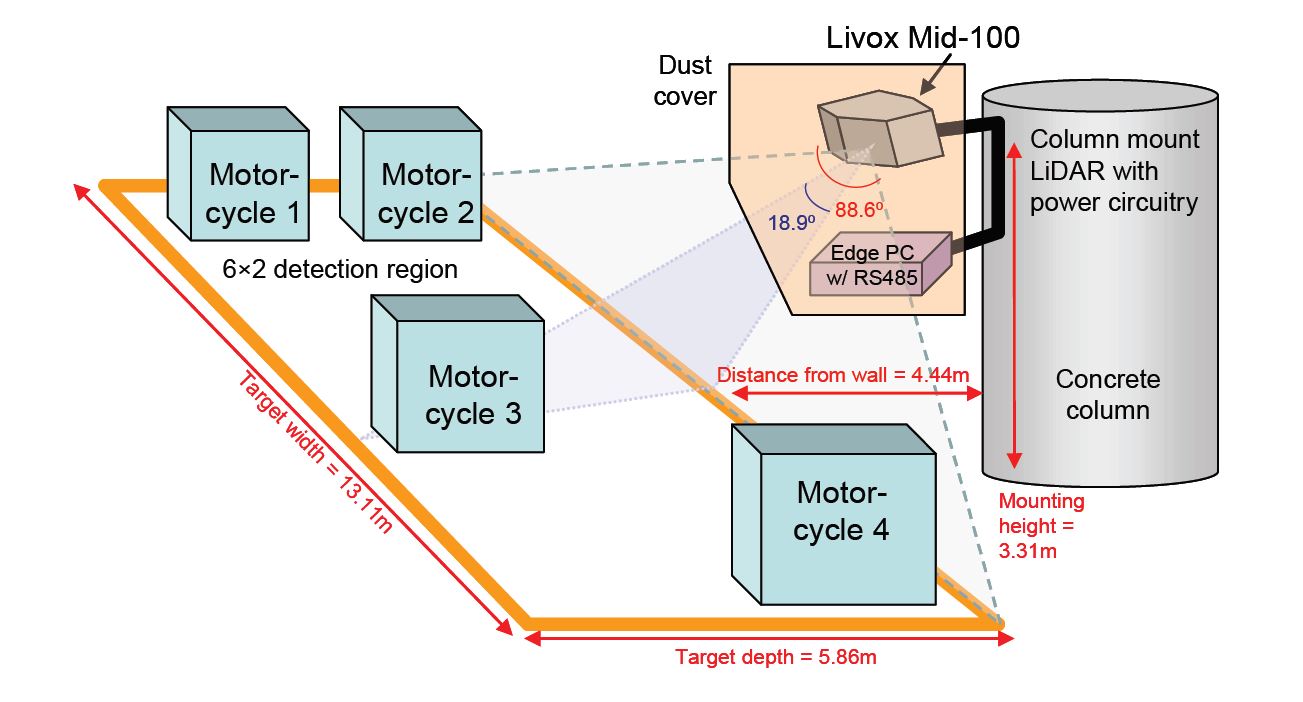
- We propose a LiDAR mounted at 3.3m or higher to cover the detection zone along with an Edge PC to provide sufficient temporary data storage and processing power. An RS-485 to USB interface is used for wireless transmission to a nearby server.
- The intelligence of this project would involve clustering of the LiDAR output (the point cloud stream) to obtain useful information followed by post-analysis to distinguish motorcycles from noise like cartoon-box and human.
- We mount a LiDAR in the site to get preliminary LiDAR data of motorcycles and perform manual analysis on their point cloud structure. The features obtained are used to train a motorcycle detection engine of the solution.
- The features of motorcycle and uninterested objects can be accumulated by the Edge PC during the development period. The more feature data it acquires, the more robust the developed system can be in terms of accuracy, reliability, and detection efficiency.
- The raw LiDAR data is stored in the Edge PC for further AI research during the development period. Successful AI techniques trained may be adopted to the solution to further improve the detection accuracy and robustness against unseen noise objects during the development period.
|
| Additional Solution Information |
Motorcycle Parking Detection Proposal.pdf
|
| Info on I&T Solution Provider |
| Solution Provider | : | AIphotonics Limited | | Address | : | Unit 616, 6th Floor, Building 12W, Hong Kong Science Park Shatin, N.T., Hong Kong | | Contact Person | : | FAN HO YAN, RICA |
| Position | : | Deputy Director | | Tel | : | 3618 7676 | | Email | : |
ricafan@aiphotonics.ai | | Webpage | : | http://aiphotonics.ai/ |
|