| I&T Solution |
LiDAR-based Obstacle Detection System for Light Rail
(REF: S-0711) |
| Trial Project |
|
| Solution Feature |
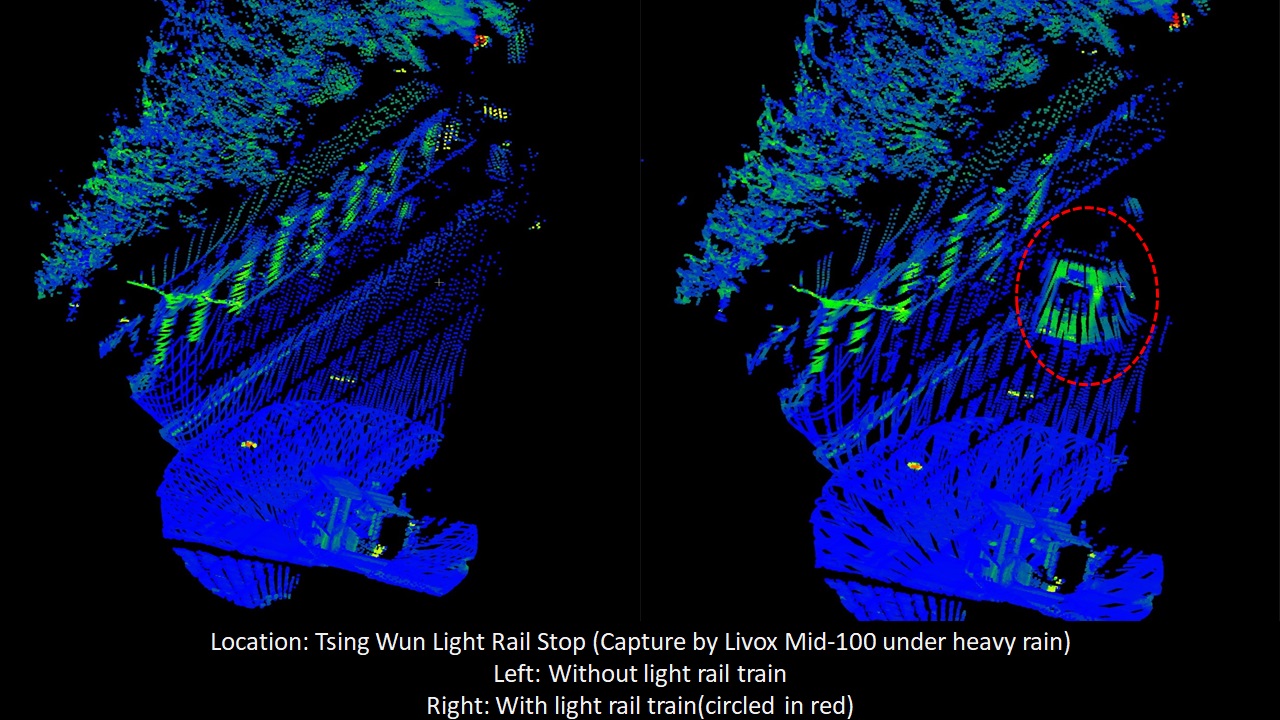
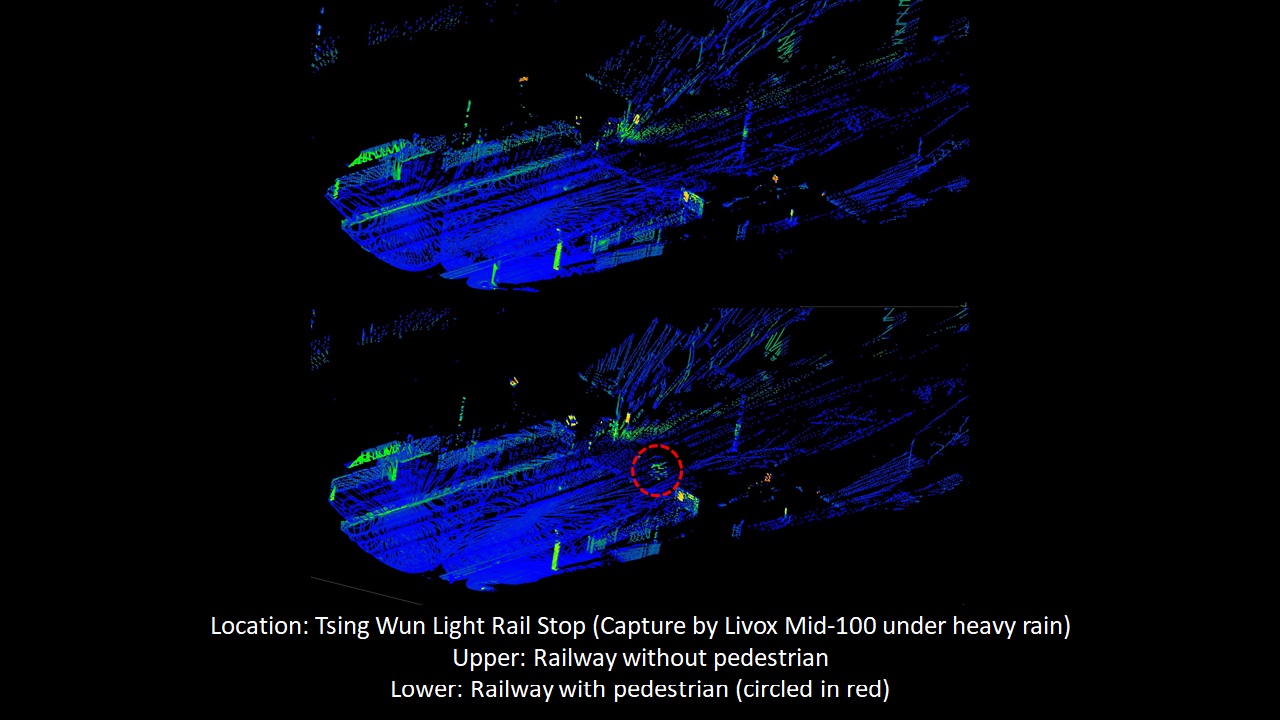
- This proof-of-concept project aims to investigate the potential of a LiDAR-based obstacle detection system for light rail. Performance evaluation involves accuracy, robustness, latency, and reliability. This system can detect abnormality and alert the operators with a snapshot image and location information, and the log files will be stored locally.
- LiDAR sensors measure distance by beaming the target with infrared laser and measuring the time of flight (TOF) using a wavelength-sensitive sensor. The output is a stream of 3D coordinate points (point-cloud) with attributes including reflection intensity and timestamp. Besides accurate depth information, LiDAR can also operate in complete darkness.
- Video and thermal-based surveillance cameras are not suitable for this obstacle detection application because without depth information, the severeness of unidentified objects along the railway cannot be accurately assessed. While passenger safety should not be compromised, the service for public transport and operation effectiveness are also at high priority.
- Inexpensive radar and ultrasound sensors can help to alert large object ahead with estimated distance, but their resolutions are too poor to meet this project's requirement. In addition, interference from surrounding objects might severely affect the overall performance in actual deployment locations.
- A LiDAR-based light-rail obstacle detection system would only gather necessary and sufficient information to detect obstacles and alert the operator at any instance. LiDAR sensors are widely used on obstacle detection and avoidance in automated driving because of its accurate depth information and object speed estimation.
|
| Trial Application and Expected Outcome |
- We propose a LiDAR mounted at sufficient height along the railway trackside to cover the detection zone. A corresponding edge PC will provide adequate storage and data processing power. A wired or wireless IoT-based transmission setup can send image and location information to the operator terminal.
- The significance of our solution would involve clustering of the LiDAR output (the point cloud stream) to retrieve useful information followed by post-analysis to distinguish obstacles from the background such as light rail, railway, road sign,and other stationary objects. We have proven our LiDAR-related capabilities in several previous projects.
- We plan to mount a LiDAR on site to acquire preliminary point-cloud data of the background environment and the passingby light rail vehicles. Manual analysis on the point-cloud structures will output key features that can be used to train the obstacle detection engine for this project.
- During the development period, features from abnormal cases of the regular train services can be gathered and recorded by the Edge PC. As this database grows, we are confident that it will help to enhance the robustness of the system and also accuracy, reliability, and detection efficiency.
- The raw LiDAR data stored in the Edge PC can be processed for further AI research. With a sufficiently large database and proper training, it is possible that besides known noisy objects, the system can also identify unknown objects that have not been encountered during the development stage.
|
| Info on I&T Solution Provider |
| Solution Provider | : | AIphotonics Limited | | Address | : | Unit 616, 6th Floor, Building 12W, Hong Kong Science Park Shatin, N.T., Hong Kong | | Contact Person | : | FAN HO YAN, RICA |
| Position | : | Deputy Director | | Tel | : | (852) 3618 7676 | | Email | : |
ricafan@aiphotonics.ai |
|