I&T Wish - End Effector of Robotic Arm for Documentation Pick & Place 2020-11-17
End Effector of Robotic Arm for Documentation Pick & Place
I&T Wish
End Effector of Robotic Arm for Documentation Pick & Place (REF: W-0339)
Matched I&T Solution
Trial Project
Summary and Challenges
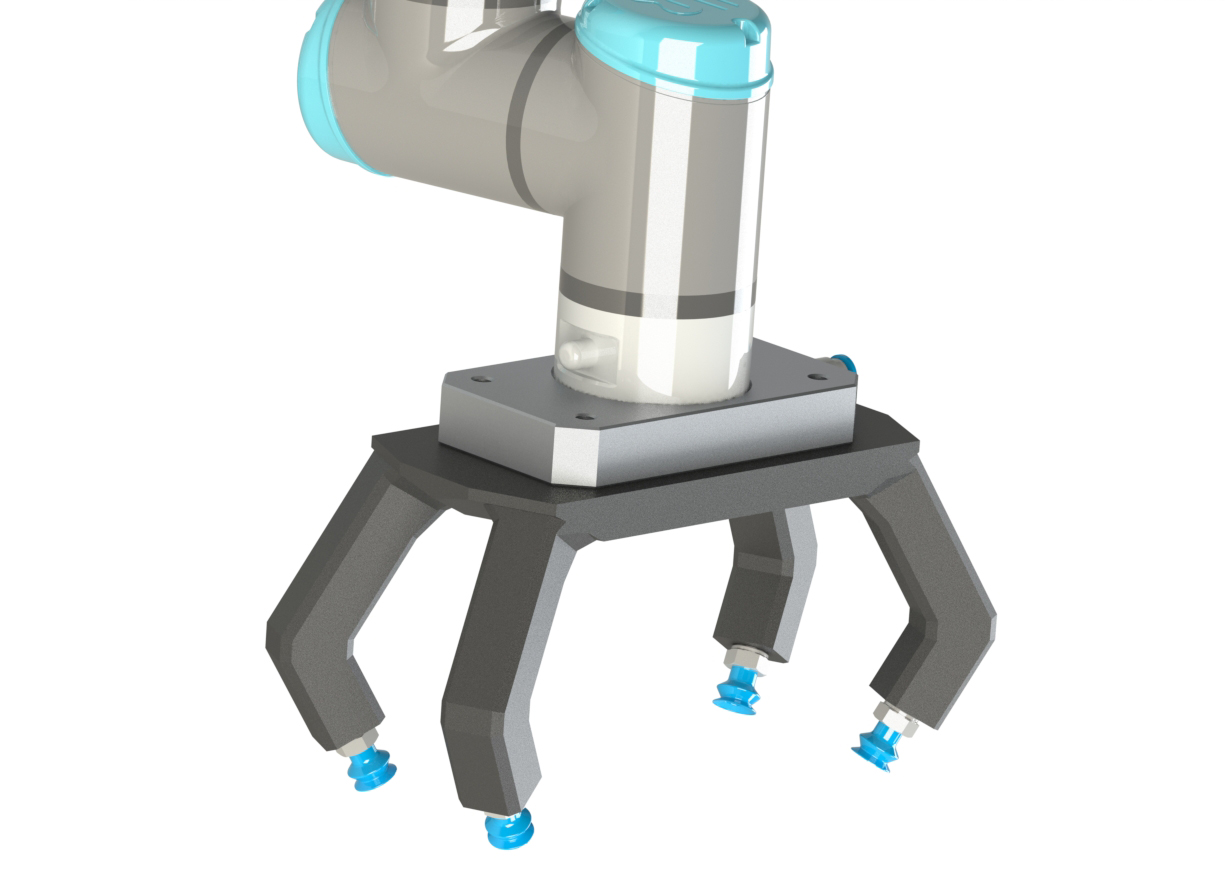
The purpose of this project is to develop an end effector for handling various types of paper documentation and tray in office area.
Expected Outcome
Design and fabricate an end effector to handle common types of document / material without any additional external container. Maximum payload shall not be less than 4kg.
The end effector shall be able to handle different types of paper documentation such as paper file, letter, and document tray etc.
The end effector shall be able to pick and place paper documentation / material on / from existing document tray and in pigeonhole of mailing cabinet.
End effector shall be compatible with robotic arm provided by EMSD.
Expected Trial Duration
2 months
Contact Information
I&T Wish Proposer
:
Electrical and Mechanical Services Department (EMSD)