I&T Wish - Quadruped Robot for Confined Space Inspection 2025-04-15
Quadruped Robot for Confined Space Inspection
I&T Wish
Quadruped Robot for Confined Space Inspection (REF: W-0567)
Matched I&T Solution
Trial Project
Summary and Challenges
Background and Challenges: Working in confined spaces presents significant safety hazards due to the potential for flammable or toxic gases, insufficient oxygen, and other dangerous conditions. Thorough safety inspections and procedures are required, and they involve substantial costs and time. Therefore, the quadruped robot is aimed to be applied in confined space inspection to improve work safety and efficiency.
Expected Outcome
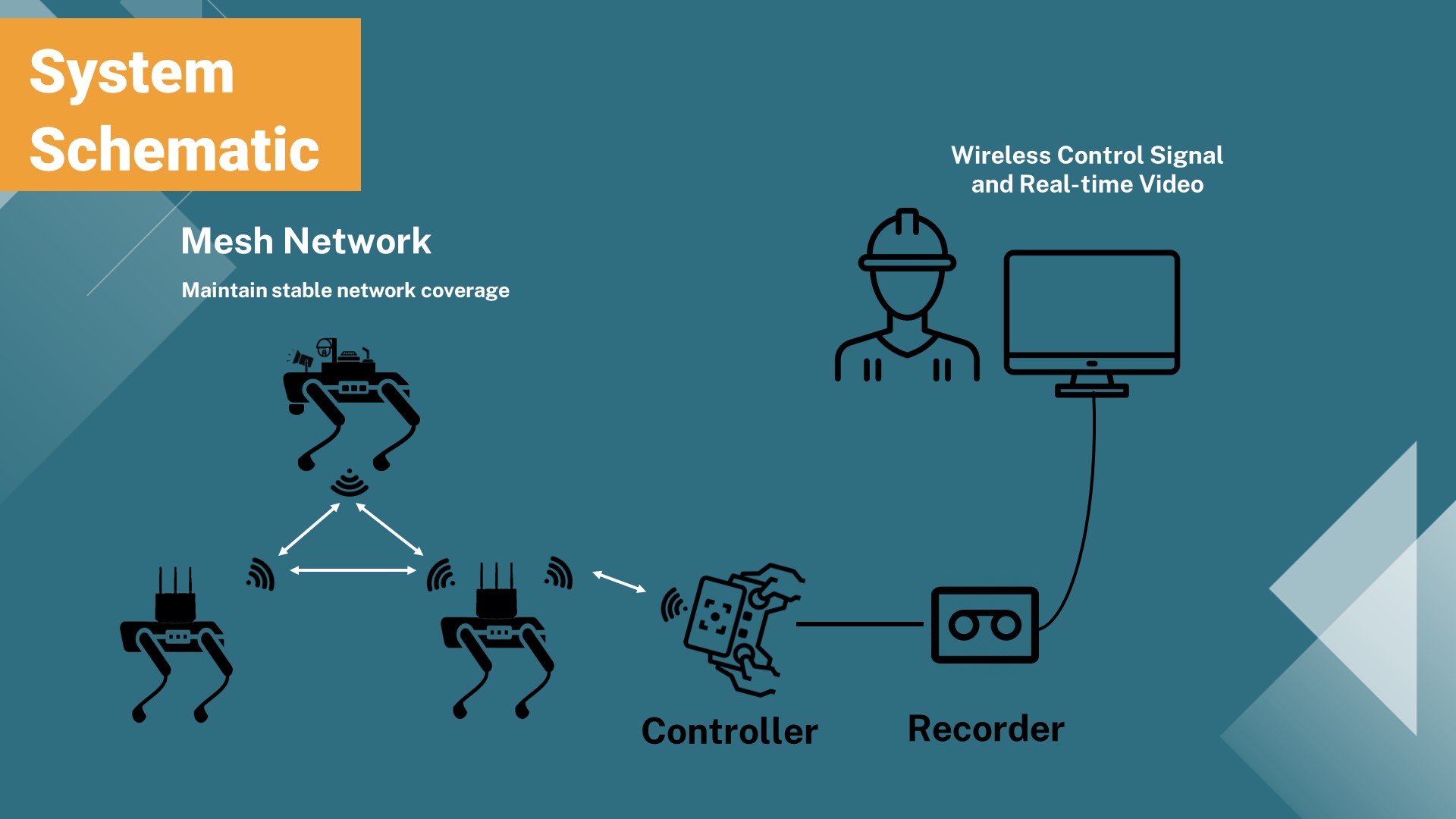
To design quadruped robots capable of navigating in confined spaces to perform inspections. The front robot shall be connected sequentially through the Wi-Fi network relayed by the rear quadruped robots. The arrangement would sequentially align with the hierarchical network, ensuring a scalable and reliable Wi-Fi network connection.
Robust Mesh Network: Maintain stable network coverage and automatic adaptation to quadruped separation/rejoining within the confined space.
Navigation & Mobility: Capable of navigating complex, uneven terrain and tight spaces within the confined space environment.
Environmental Resilience: Quadrupeds and integrated equipment must withstand the specific hazards present in the confined space (e.g., dust, humidity, gas).
Payload Capacity: Carry necessary inspection equipment without compromising mobility.
Remote Operation & Monitoring: Provide a user interface for real-time video feed, sensor data display, and system status monitoring.
Autonomous/Semi-Autonomous Operation: Capability for both fully autonomous inspection runs and operator-guided control.
Expected Trial Duration
9-month
Contact Information
I&T Wish Proposer
:
Electrical and Mechanical Services Department (EMSD)
.PNG)
.PNG)