人工智能第六感(非破坏性)预知检视分析巡逻机器狗

| 创科方案 | 人工智能第六感(非破坏性)预知检视分析巡逻机器狗 (编号: S-1086) |
|||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 试验项目 | ||||||||||||||||||||||
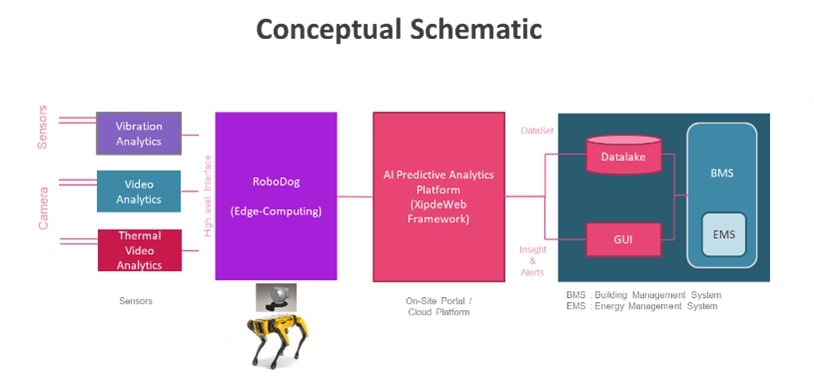
| 方案特点 |


|
|||||||||||||||||||||
| 试验应用及预期成果 |
|
|||||||||||||||||||||
| 附加方案资料 | XS_Inno_Portal-RoboDog-proposal.pdf | |||||||||||||||||||||
| 方案提供者资料 |
|
有关上述创新科技解决方案的详情,请联络方案提供者查询。