机场跑道灯清洁道路机器人
| 创科方案 |
机场跑道灯清洁道路机器人
(编号: S-1350) |
| 已配对创科愿望 |
|
| 试验项目 |
|
| 方案特点 |
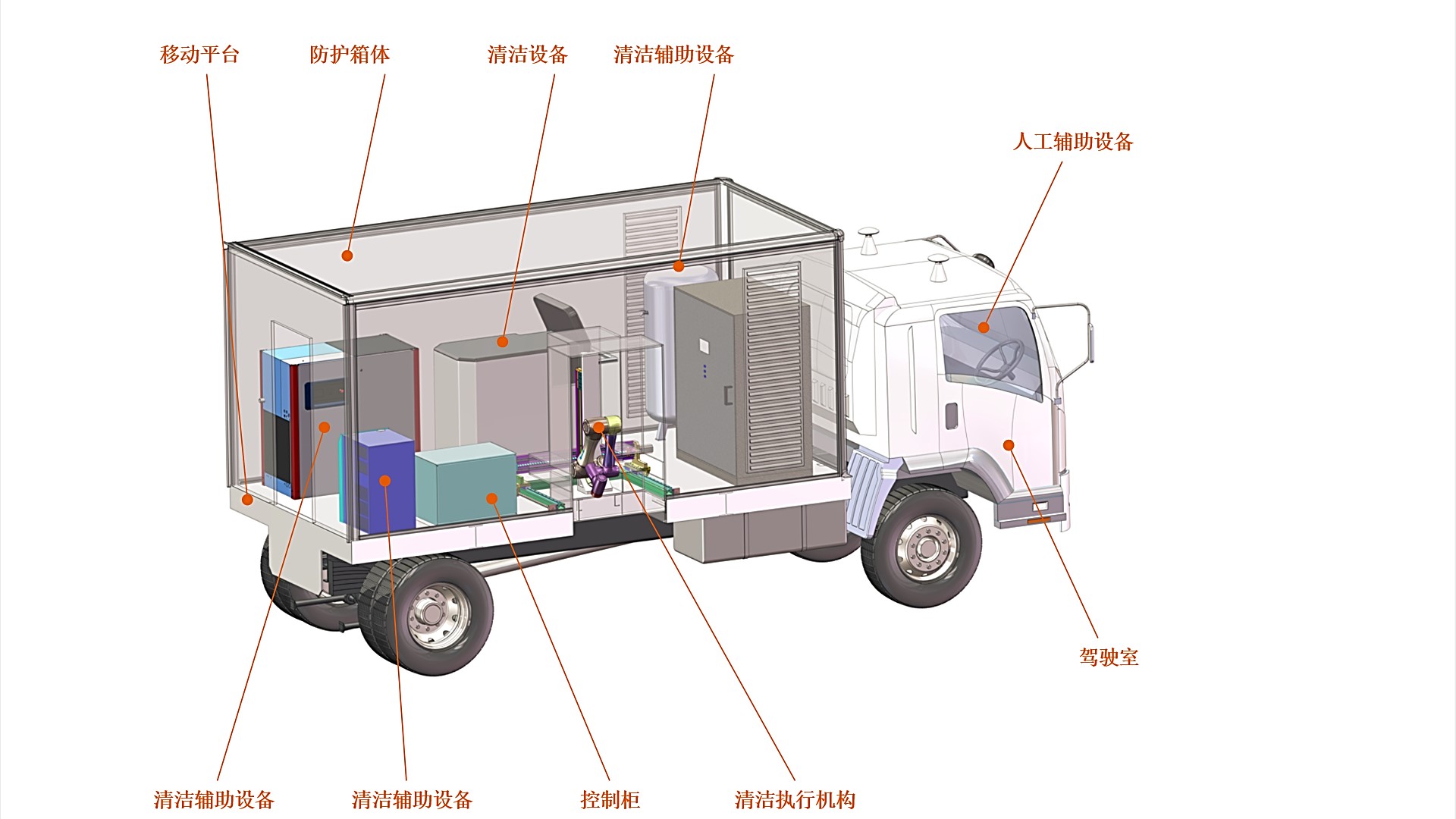
- 采用多传感资料融合技术,道路机器人全域定位感知导航移动,并实现局部二次精确定位作业
- 道路机器人可全自动完成跑道灯清洁,替代人工清洁和检测,提高工作效率
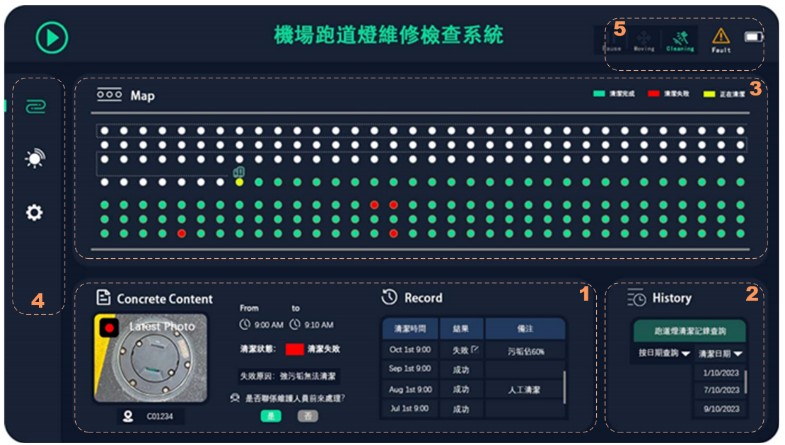
- 统一操控软体系统,实现图像化人机交互、资料记录查询和设备监控功能
- 模组化设计,便于扩展和维护。人工辅助和全自动导航移动功能,完成正常与紧急条件下的处理策略
- 采用先进成熟的干冰清洁工艺,结合道路机器人的清洁作业与清洁结果闭环控制技术,实现智慧优化清洁策略功能
|
| 试验应用及预期成果 |
- 全域定位与自主移动定位精度控制技术,精确跟踪与定位道路机械人位置,精确控制道路机器人移动和停靠位置
- 在光照度与环境变化条件下,实现灯具二次精确定位识别与清洁控制技术,以完成道路机器人对跑道灯面的清洁工作
- 使用全自动清洁作业路线规划与清洁效率提升优化技术,无需人工干预作业
- 道路机器人采用模组化设计,一体化集成方式实现,由各子系统以通信方式实现资料互联
- 人机交互介面将统一输出、显示、记录光强检测与清洁资料,并提供查询和设备监控功能
|
| 方案提供者资料 |
| 方案提供者 | : | 徐智浩 | | 地址 | : | 广东省广州市越秀区先烈中路100号13号楼 广东省科学院智慧制造研究所 | | 联络人 | : | 徐智浩 |
| 职位 | : | 博士 | | 电话 | : | +86 18126712606 | | 电子邮件 | : |
zh.xu@giim.ac.cn |
|
有关上述创新科技解决方案的详情,请联络方案提供者查询。