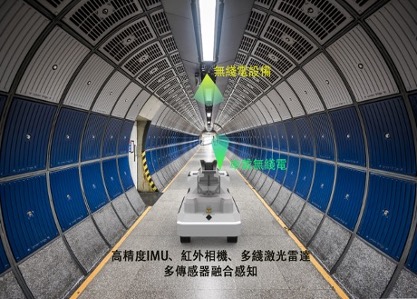
BIM 引导机器人在政府隧道中清洁过滤器
| 创科方案 | BIM 引导机器人在政府隧道中清洁过滤器 (编号: S-1560) |
|||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 试验项目 | ||||||||||||||||||||||
| 方案特点 |


|
|||||||||||||||||||||
| 试验应用及预期成果 |
|
|||||||||||||||||||||
| 附加方案资料 | TechnicalProposal-W-0498-v7.docx | |||||||||||||||||||||
| 方案提供者资料 |
|
有关上述创新科技解决方案的详情,请联络方案提供者查询。