| 创科方案 |
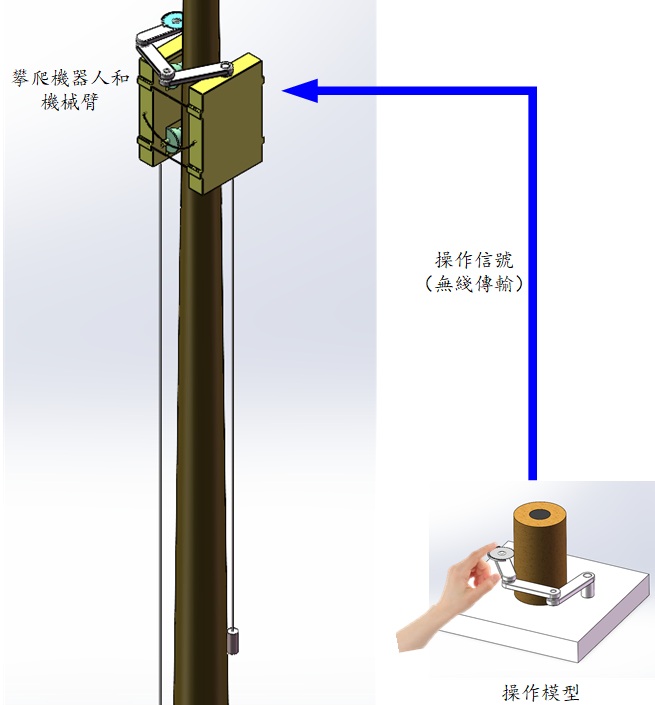
棕榈树攀爬机器人和枯叶修剪机械臂
(编号: S-1973) |
| 试验项目 |
|
| 方案特点 |
- 攀爬结构可适应不规则树干,自动调整姿态并同步移动,确保稳定攀升。
- 多关节机械臂采主从控制,操作者可直觉操作,实现360°高空精准修剪。
- 配备多重安全装置,包括重力开关、保险绳、自锁机构与手动回收设计。
- 适用树干直径150–400mm,整体重量不超过35kg,具备良好户外机动性。
- 有效减低人员高空作业风险,提升修剪效率与安全,具备现场实施潜力。
|
| 试验应用及预期成果 |
- 制作原型并整合控制系统,完成基本功能测试以验证技术可行性。
- 搭建模拟树干场景,测试攀爬与修剪流程以确认稳定性与可靠性。
- 模拟异常状况测试安全装置与回收机构,确保故障应对有效。
- 实测主从控制系统与机械臂动作精度,确保修剪操作直观且反应灵敏。
- 进行实地操作演示与用户试用,优化系统以达成部署标准
|
| 附加方案资料 |
(可公開)棕櫚樹攀爬機器人和枯葉修剪機械臂.pdf
|
| 方案提供者资料 |
| 方案提供者 | : | 杭州孚亚科技有限公司 | | 地址 | : | 浙江省 杭州市 萧山区 宁围街道 杭州市萧山区经济技术开发区金一路79号A楼202室 | | 联络人 | : | 黎鑫 |
| 职位 | : | 縂经理 | | 电话 | : | +86-15868873839 | | 电子邮件 | : |
vortexdoctor@zju.edu.cn |
|