| 创科方案 |
开发应用于栏杆的机器人焊接系统和缺陷检查装置
(编号: S-0540) |
| 试验项目 |
|
| 方案特点 |
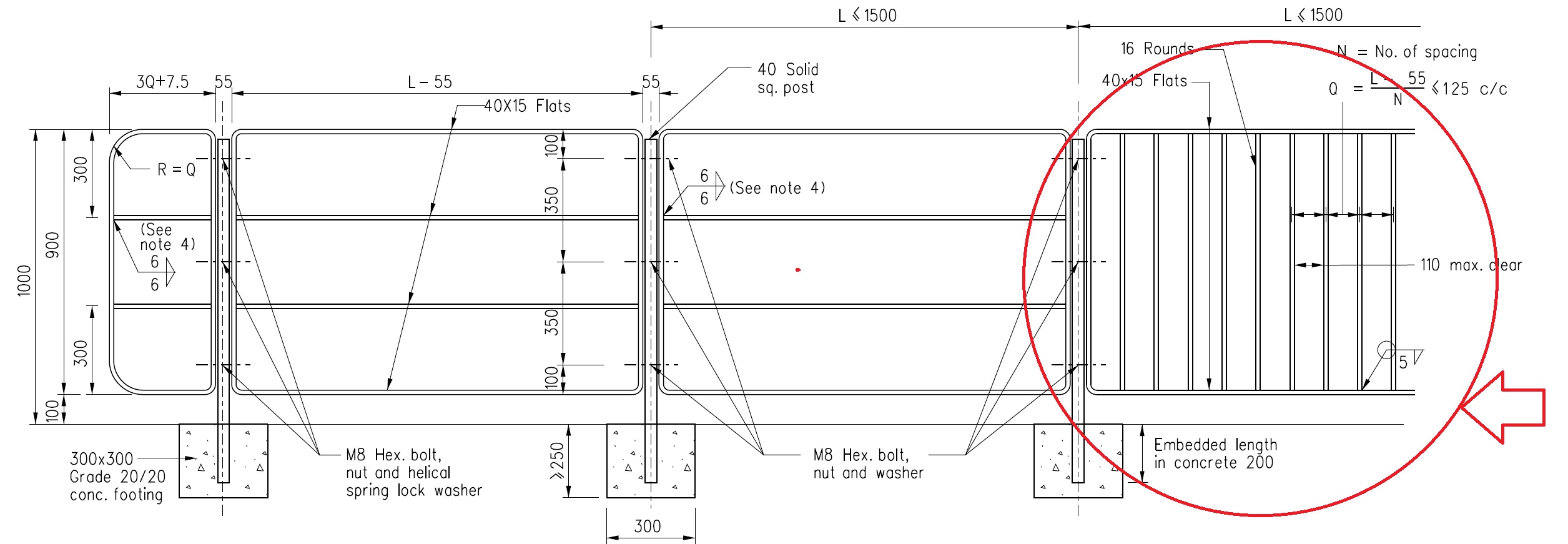
- 此系统用于处理钢栏杆的圆钢与外框的焊接。系统包括夹具,旋转台,焊接机器人,缺陷检查系统和安全装置。
- 工件将由人手手动装卸,而焊接和检查过程将全自动操作。
- 夹具提供工作台将圆棒和外框定位。工件的位置将透过气动或电动设备固定,以减少定位时间和误差。
- 旋转台将工件旋转,令机器人接触到工件正面及背面,减少行程。机器人亦会固定在底座上,确保可重复性。
- 工业级六轴机械臂将安装焊枪及配备MIG焊机和送丝机。利用视觉,超声波或辐射光束系统,检测内部或表面。
|
| 试验应用及预期成果 |
- 整个项目将分为三个阶段:工作流程和布局检讨,自动机器人焊接系统和缺陷检查装置的安装。
- 阶段1:工作流程和布局检讨。检讨人手焊接操作流程,并建议修改工作流程和布局,以配合自动焊接工艺。
- 阶段2:自动机器人焊接系统。 制定技术规格及制造。进行FAT并修改设计。 安装并安全检查,UAT及操作培训。
- 阶段3:缺陷检查设备。 提出方案(视觉,超声波或辐射光束)。 制定技术规格及制造。进行UAT及评估有效性。
|
| 附加方案资料 |
Robotic welding System 20200317-2.pdf
|
| 方案提供者资料 |
| 方案提供者 | : | 香港生产力促进局 | | 地址 | : | 香港九龙达之路78号生产力大楼 | | 联络人 | : | 孙国伟 |
| 职位 | : | 首席顾问 (智能制造及内地业务部) | | 电话 | : | 2788 5552 | | 电子邮件 | : |
samsons@hkpc.org |
|