物联网物流机器人
| 创科方案 |
物联网物流机器人
(编号: S-0578) |
| 试验项目 |
|
| 方案特点 |
- 该机器人用于办公室环境中的文件分拣与运输。它具有智慧任务管理功能并可以全自动运行。
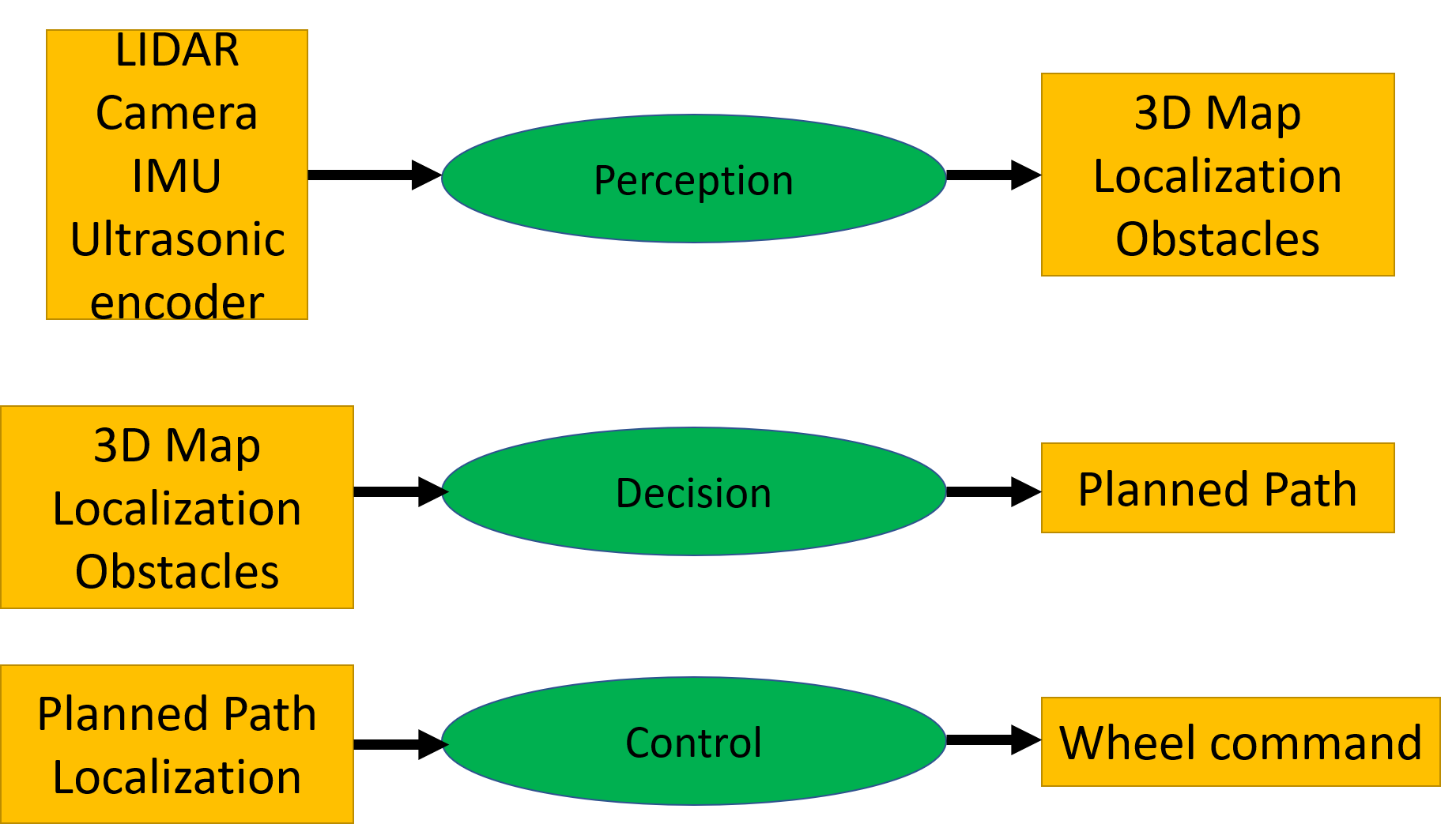
- 导航:导航模型可以在复杂的室内场景中稳定运行,其任务包含了定位、建图、避障以及路径规划。
- 文件架交互:该机器人通过扫描档柜上的二维码定位目的档案箱。它有一个可折叠的叉状抓取器来存取文件。
- 使用者介面:我们会为机器人档递送服务开发使用者交互介面。基于本地网路的网站可以实现多种复杂的功能。
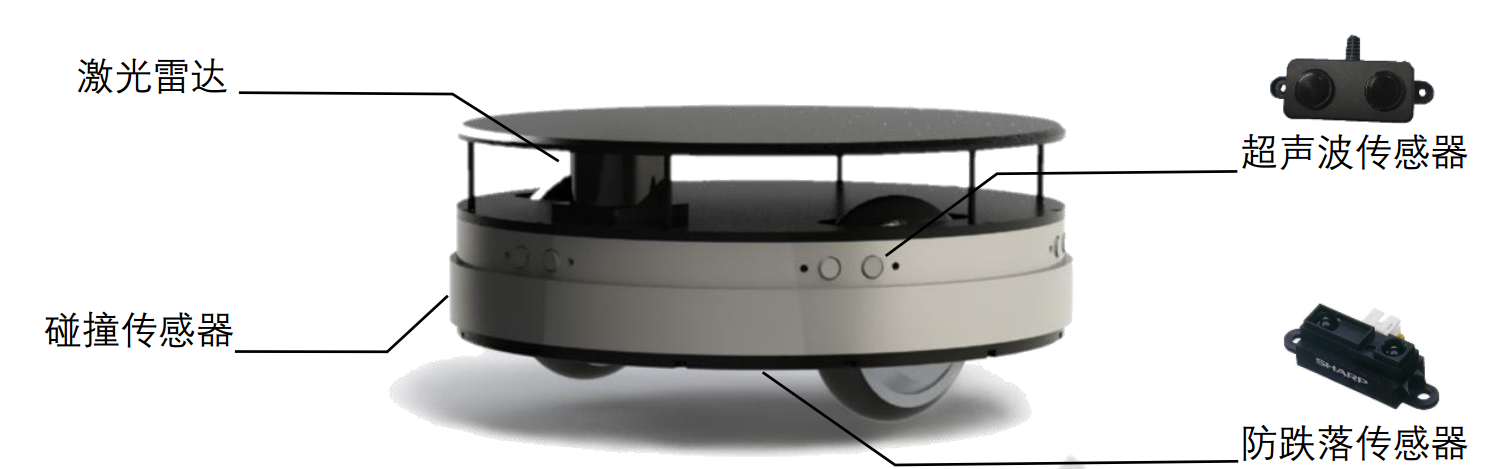
- 硬体整合:该机器人平台包括运动底板、电池、感知感测器以及叉状抓取器,它将支援自动充电功能。
|
| 试验应用及预期成果 |
- 该机器人的有效性可以通过室内场景测试得到验证。定位精度、递送效率等指标可被用于评估机器人的性能。
- 我们首先会基于Lidar建立办公室的3D地图。之后我们通过ICP演算法得到机器人的位置资讯。定位误差会小于1cm。
- 为了实现档架交互,我们在夹子的每一层都贴上了二维码。机器人可以通过二维码实现对目的档案的定位。
- 我们会基于本地网路建立用于使用者交互的网站。网站设计包含了前端以及后端档递送相关的优化演算法。
- 我们会在办公室区域部署多个充电站,并将其标注在3D地图上。当机器人电量低时,它会前往一个充电点充电。
|
| 方案提供者资料 |
|
有关上述创新科技解决方案的详情,请联络方案提供者查询。