四足机器人在雾化灭蚊作业的应用
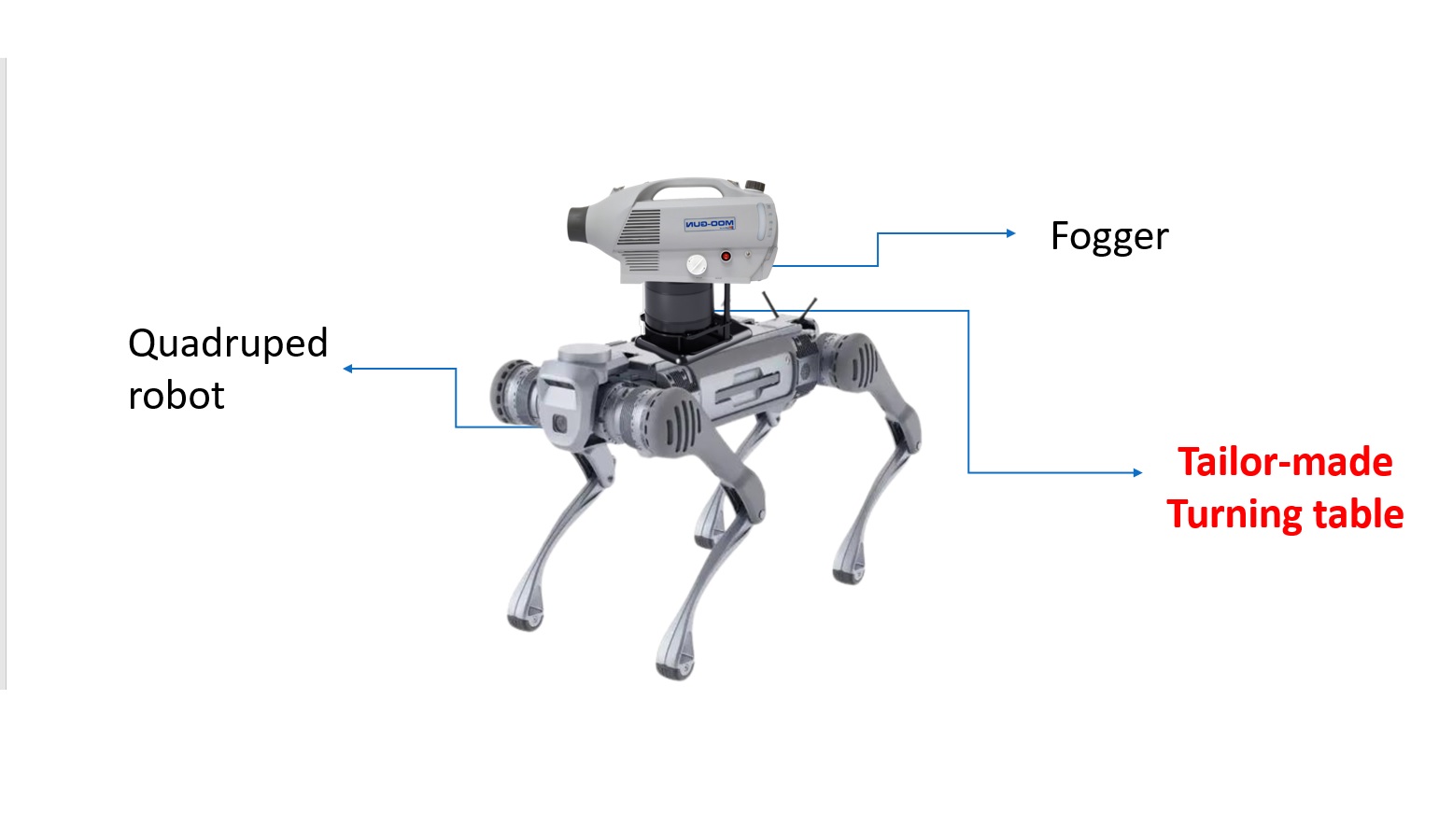
| 创科愿望 | 四足机器人在雾化灭蚊作业的应用 (编号: W-0551) |
|||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 已配对创科方案 | ||||||||||||||||
| 试验项目 | ||||||||||||||||
| 摘要及挑战 |
|
|||||||||||||||
| 预期成果 |
|
|||||||||||||||
| 预计试验期限 | 2个月 | |||||||||||||||
| 联络资料 |
|
|||||||||||||||
| 发起部门 | 食物环境卫生署 | |||||||||||||||
| 创建日期 | 2024-10-21 | |||||||||||||||
| 截止日期 | 2024-11-04 | |||||||||||||||
| 提议创科方案 | 已截止 |