| 创科愿望 |
用于密闭空间的四脚机器人
(编号: W-0567) |
| 已配对创科方案 |
|
| 试验项目 |
|
| 摘要及挑战 |
- 背景和挑战:在密闭空间作业存在着重大的安全隐患,可能存在易燃易爆气体、有毒气体、缺氧等危险情况。而彻底的安全检查以及工作需要一定的人力和成本。因此,希望四足机器人能应用于密闭空间,推升工作安全和效率。
|
| 预期成果 |
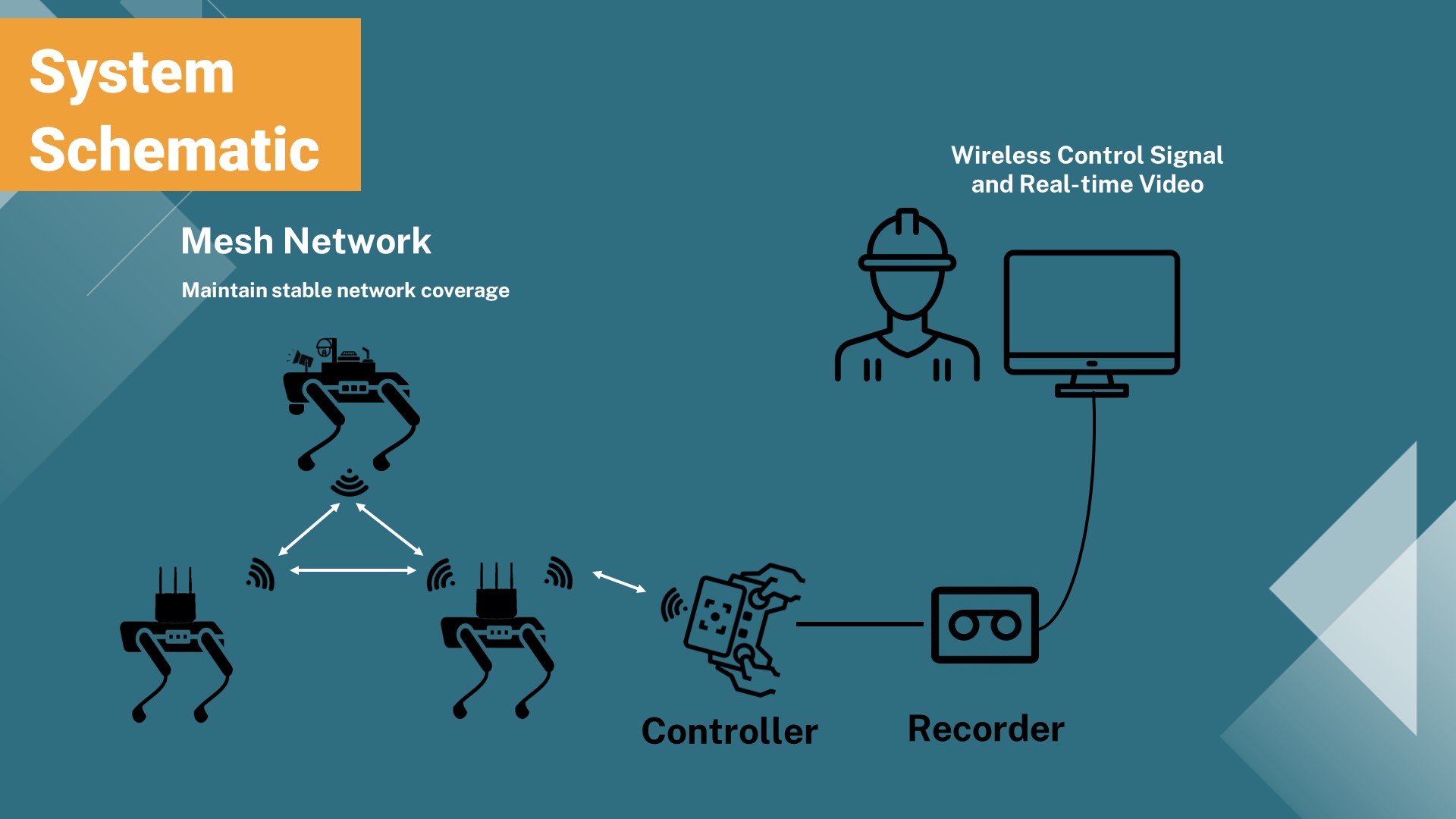
- 设计能够在密闭空间内进行巡检的四足机器人。前方机械人透过其他四足机械人将讯号传递,并确保网路连接的可扩展性和可靠性。
- 稳定可靠的网路复盖:在密闭空间内,保持稳定的网路复盖,并能自动控制四脚机器人的分离/重新连接。
- 导航与移动能力:能够在复杂环境、不平坦地形和狭小空间内进行导航。
- 环境适应性:四脚机器人及其集成设备必须能够抵挡闭密空间内的严苛环境(例如,灰尘、湿度、气体)。
- 载荷能力:在不影响移动性的前提下,负载必要的设备。
- 远程操作与监控:提供使用者介面,用于传送即时影像、感测器资料显示和系统状态监控。
- 自动/半自动操作:具备全自动操作和人手半自动操作。
|
| 预计试验期限 |
9个月
|
| 联络资料 |
|
| 发起部门 |
渠务署
|
| 创建日期 |
2025-04-16
|
| 截止日期 |
2025-04-23
|
| 提议创科方案 |
提交方案
|
.PNG)
.PNG)