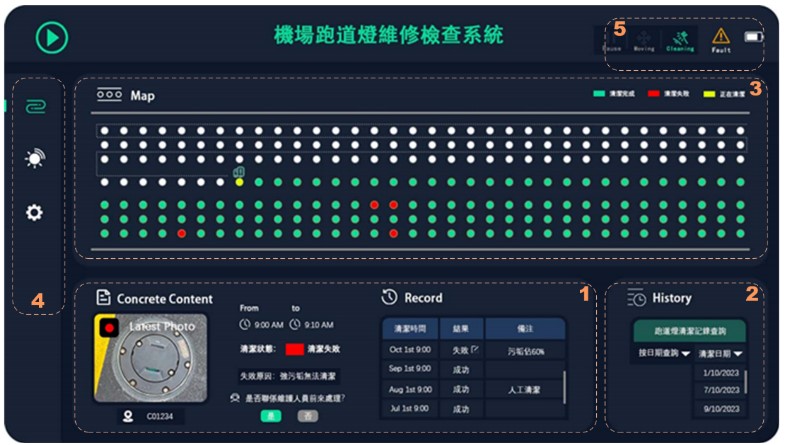
机场跑道助航灯自动维护机械人

| 试验项目名称 | 机场跑道助航灯自动维护机械人 (编号: P-0296) |
||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 已配对创科愿望 | |||||||||||||||||||
| 已配对创科方案 | |||||||||||||||||||
| 方案特点 |
|
||||||||||||||||||
| 试验资料 |
|
||||||||||||||||||
| 方案提供者资料 |
|