機場跑道燈清潔道路機器人
| 創科方案 |
機場跑道燈清潔道路機器人
(編號: S-1350) |
| 已配對創科願望 |
|
| 試驗項目 |
|
| 方案特點 |
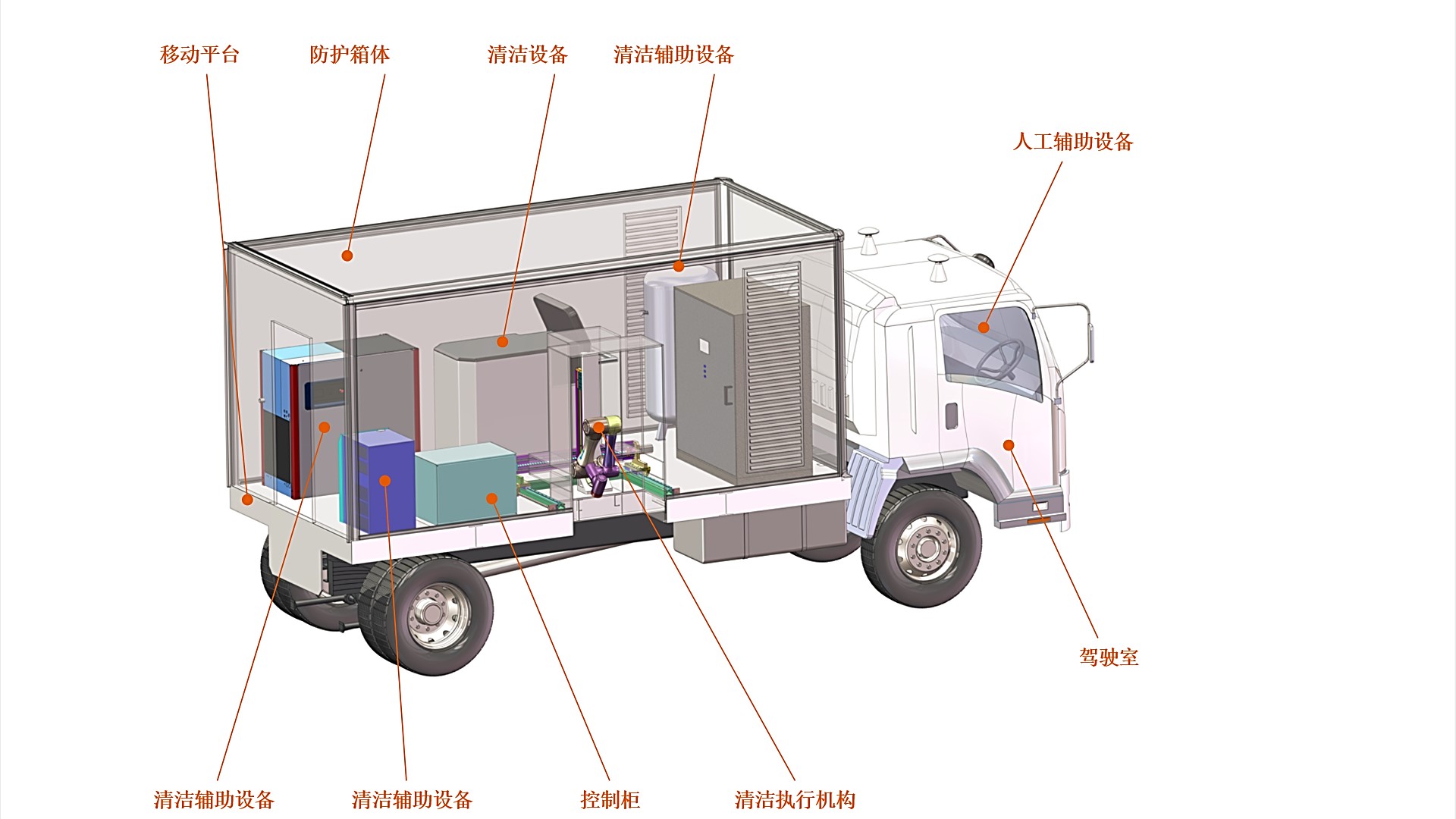
- 採用多傳感資料融合技術,道路機器人全域定位感知導航移動,並實現局部二次精確定位作業
- 道路機器人可全自動完成跑道燈清潔,替代人工清潔和檢測,提高工作效率
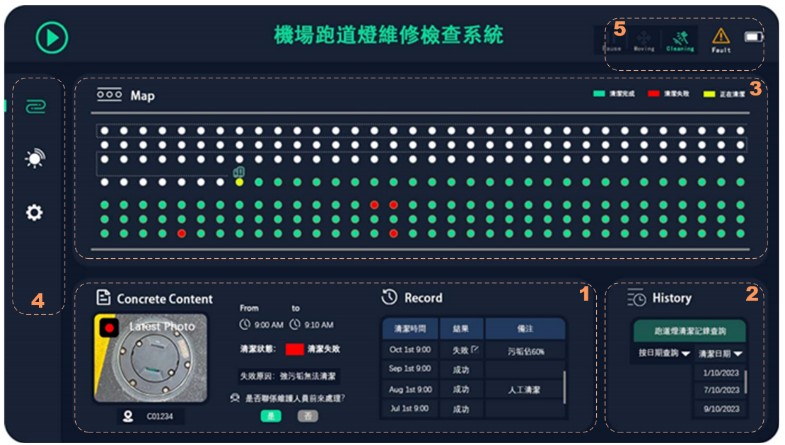
- 統一操控軟體系統,實現圖像化人機交互、資料記錄查詢和設備監控功能
- 模組化設計,便於擴展和維護。人工輔助和全自動導航移動功能,完成正常與緊急條件下的處理策略
- 採用先進成熟的乾冰清潔工藝,結合道路機器人的清潔作業與清潔結果閉環控制技術,實現智慧優化清潔策略功能
|
| 試驗應用及預期成果 |
- 全域定位與自主移動定位精度控制技術,精確跟蹤與定位道路機械人位置,精確控制道路機器人移動和停靠位置
- 在光照度與環境變化條件下,實現燈具二次精確定位識別與清潔控制技術,以完成道路機器人對跑道燈面的清潔工作
- 使用全自動清潔作業路線規劃與清潔效率提升優化技術,無需人工干預作業
- 道路機器人採用模組化設計,一體化集成方式實現,由各子系統以通信方式實現資料互聯
- 人機交互介面將統一輸出、顯示、記錄光強檢測與清潔資料,並提供查詢和設備監控功能
|
| 方案提供者資料 |
| 方案提供者 | : | 徐智浩 | | 地址 | : | 廣東省廣州市越秀區先烈中路100號13號樓 廣東省科學院智慧製造研究所 | | 聯絡人 | : | 徐智浩 |
| 職位 | : | 博士 | | 電話 | : | +86 18126712606 | | 電子郵件 | : |
zh.xu@giim.ac.cn |
|
有關上述創新科技解決方案的詳情,請聯絡方案提供者查詢。