| 創科方案 |
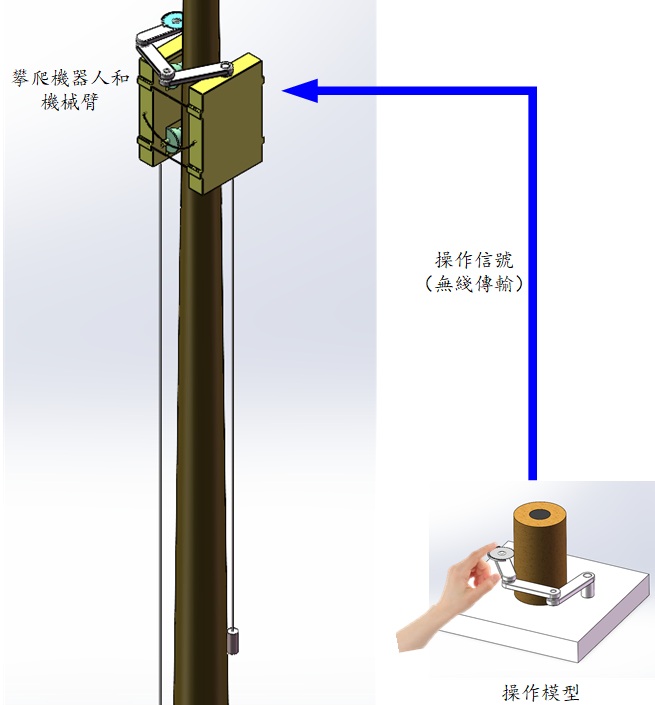
棕櫚樹攀爬機器人和枯葉修剪機械臂
(編號: S-1973) |
| 試驗項目 |
|
| 方案特點 |
- 攀爬結構可適應不規則樹幹,自動調整姿態並同步移動,確保穩定攀升。
- 多關節機械臂採主從控制,操作者可直覺操作,實現360°高空精準修剪。
- 配備多重安全裝置,包括重力開關、保險繩、自鎖機構與手動回收設計。
- 適用樹幹直徑150–400mm,整體重量不超過35kg,具備良好戶外機動性。
- 有效減低人員高空作業風險,提升修剪效率與安全,具備現場實施潛力。
|
| 試驗應用及預期成果 |
- 製作原型並整合控制系統,完成基本功能測試以驗證技術可行性。
- 搭建模擬樹幹場景,測試攀爬與修剪流程以確認穩定性與可靠性。
- 模擬異常狀況測試安全裝置與回收機構,確保故障應對有效。
- 實測主從控制系統與機械臂動作精度,確保修剪操作直觀且反應靈敏。
- 進行實地操作演示與用戶試用,優化系統以達成部署標準
|
| 附加方案資料 |
(可公開)棕櫚樹攀爬機器人和枯葉修剪機械臂.pdf
|
| 方案提供者資料 |
| 方案提供者 | : | 杭州孚亚科技有限公司 | | 地址 | : | 浙江省 杭州市 蕭山區 寧圍街道 杭州市蕭山區經濟技術開發區金一路79號A樓202室 | | 聯絡人 | : | 黎鑫 |
| 職位 | : | 縂經理 | | 電話 | : | +86-15868873839 | | 電子郵件 | : |
vortexdoctor@zju.edu.cn |
|