| 創科願望 |
用於密閉空間的四腳機器人
(編號: W-0567) |
| 已配對創科方案 |
|
| 試驗項目 |
|
| 摘要及挑戰 |
- 背景和挑戰:在密閉空間作業存在著重大的安全隱患,可能存在易燃易爆氣體、有毒氣體、缺氧等危險情況。而徹底的安全檢查以及工作需要一定的人力和成本。因此,希望四足機器人能應用於密閉空間,推升工作安全和效率。
|
| 預期成果 |
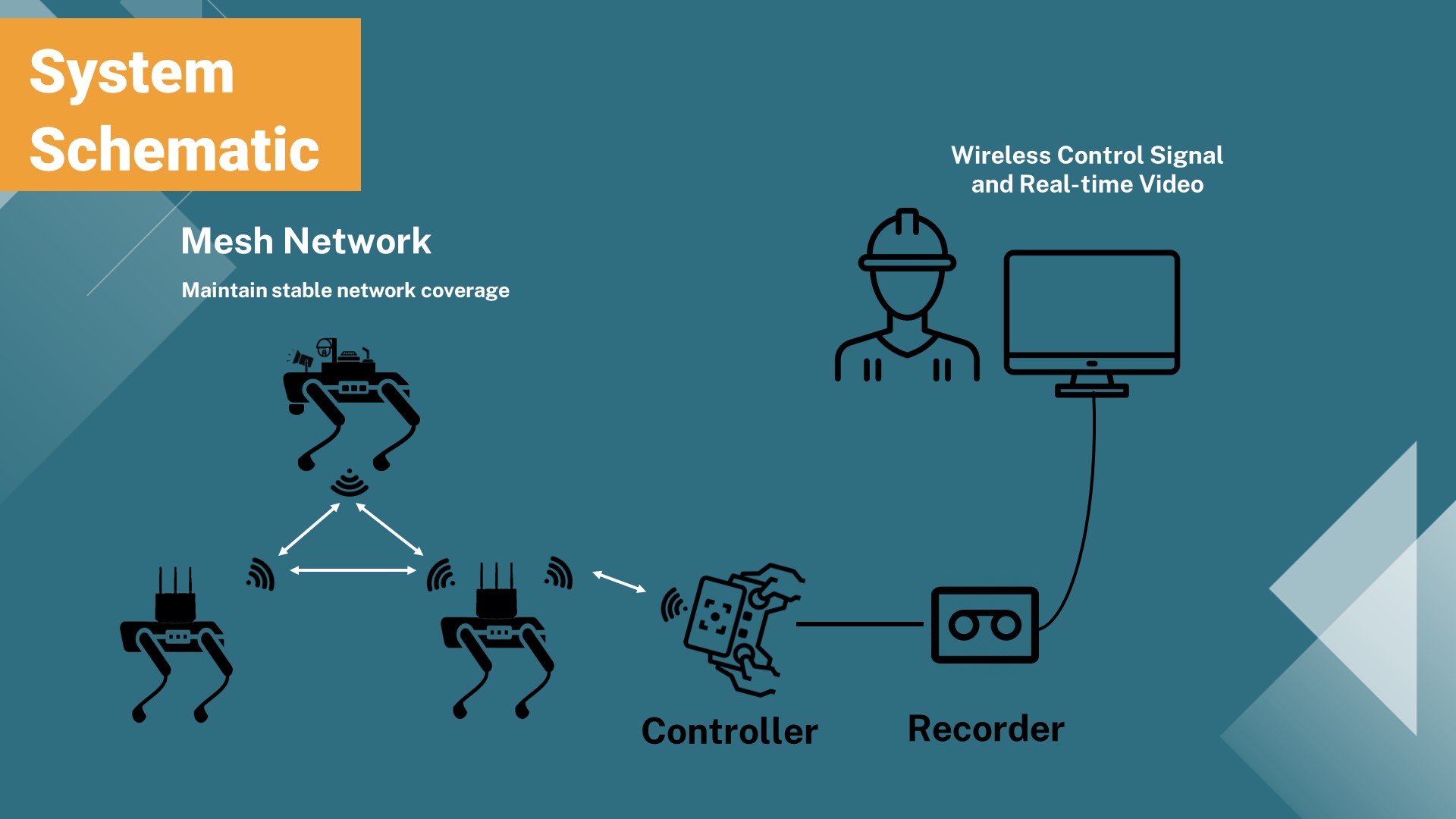
- 設計能夠在密閉空間內進行巡檢的四足機器人。前方機械人透過其他四足機械人將訊號傳遞,並確保網路連接的可擴展性和可靠性。
- 穩定可靠的網路覆蓋:在密閉空間內,保持穩定的網路覆蓋,並能自動控制四腳機器人的分離/重新連接。
- 導航與移動能力:能夠在複雜環境、不平坦地形和狹小空間內進行導航。
- 環境適應性:四腳機器人及其集成設備必須能夠抵擋閉密空間內的嚴苛環境(例如,灰塵、濕度、氣體)。
- 載荷能力:在不影響移動性的前提下,負載必要的設備。
- 遠程操作與監控:提供使用者介面,用於傳送即時影像、感測器資料顯示和系統狀態監控。
- 自動/半自動操作:具備全自動操作和人手半自動操作。
|
| 預計試驗期限 |
9個月
|
| 聯絡資料 |
|
| 發起部門 |
渠務署
|
| 創建日期 |
2025-04-16
|
| 截止日期 |
2025-04-23
|
| 提議創科方案 |
提交方案
|
.PNG)
.PNG)