| I&T Solution |
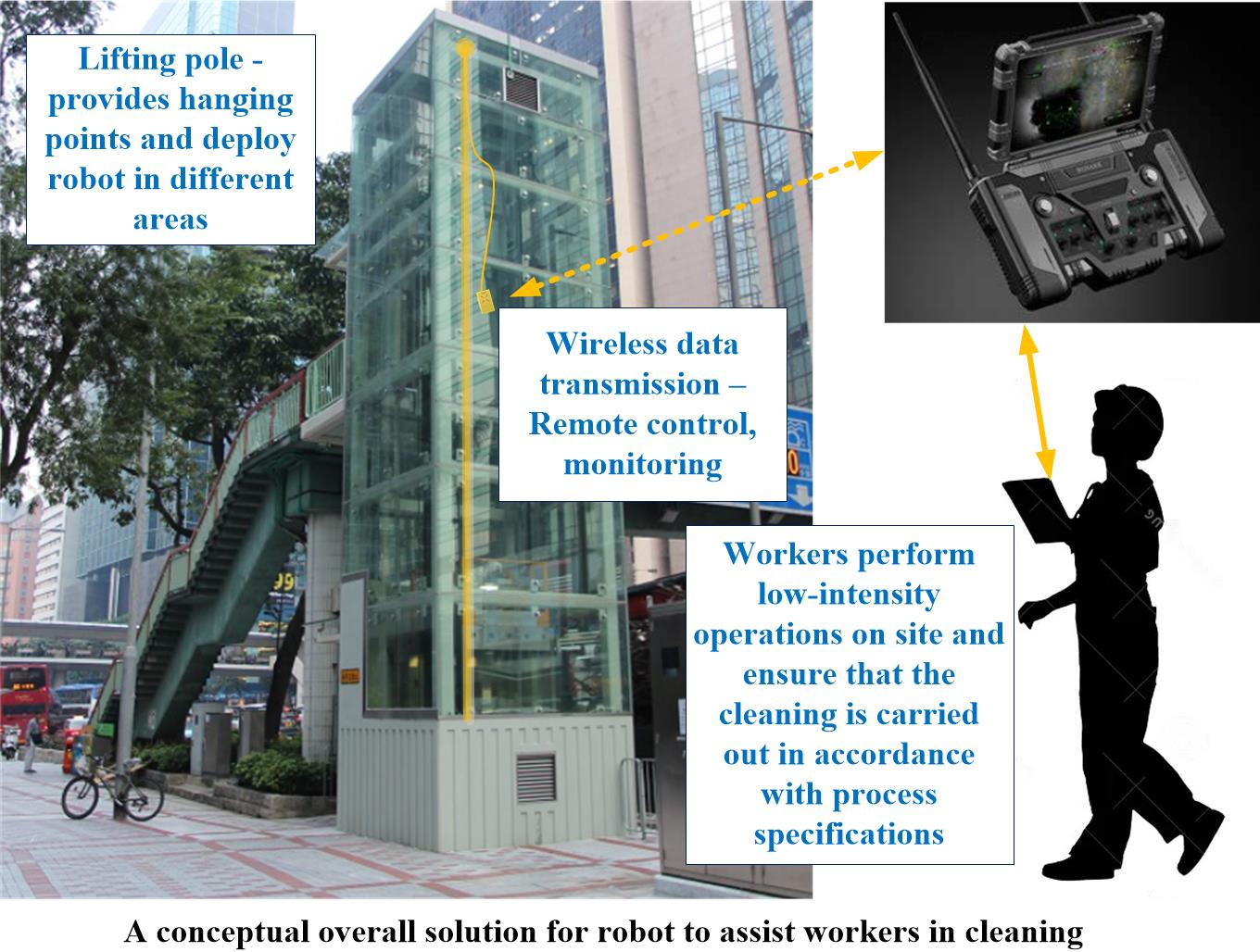
Cleansing Robot for Footbridge Lifts
(REF: S-1767) |
| Trial Project |
|
| Solution Feature |
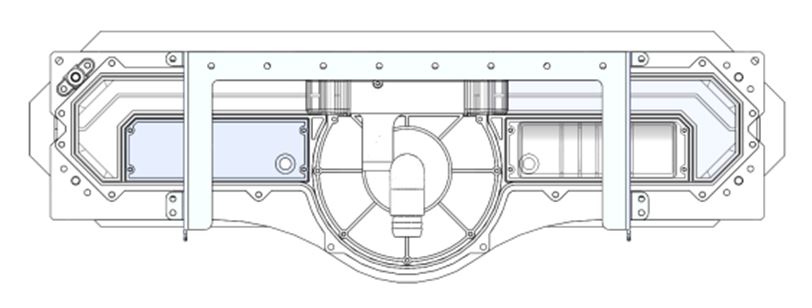
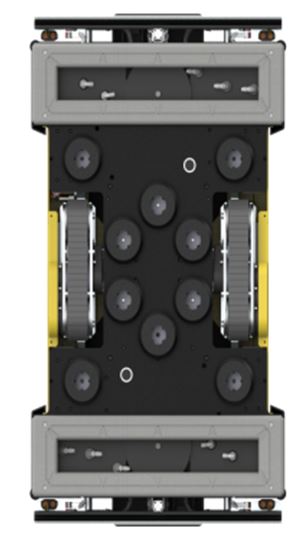
- Sealed self-cleaning module to ensure strong decontamination ability (including spray mechanism and rolling brush cleaning mechanism)
- Clean sewage recovery and multistage filtration system, to achieve on-board water recycling (can also be external water)
- Tethered power supply + liftable pole and safety rope to ensure durable, safe operation and flexible deployment
- Multi-chamber negative pressure adsorption technology, to ensure safety over the seam without desorption
- Remote map data transmission remote control integrated, remote operation and monitoring
|
| Trial Application and Expected Outcome |
- Survey the project site, find similar scenes near the company, and use them as follow-up test sites to verify product functionality and stability
- Further optimize existing key technical points to improve stability and solve miniaturization problems
- According to the space and structural characteristics of the elevator, design the liftable hanging pole and the deployment/recovery procedures
- Based on on-site research and current cleaning process, determine the workflow of the robot’s assist cleaning method.
- Develop products in strict accordance with IPD process, increase decision points, and ensure successful product development
|
| Additional Solution Information |
HKPC-Cleansing Robot for Footbridge Lifts-update on March 25 2024.pdf
|
| Info on I&T Solution Provider |
| Solution Provider | : | The Hong Kong Productivity Council | | Address | : | HKPC Building, 78 Tat Chee Avenue, Kowloon, Hong Kong | | Contact Person | : | WU Shilin |
| Position | : | Postdoc researcher | | Tel | : | 51637141 | | Email | : |
slwu@hkpc.org | | Webpage | : | https://www.hkpc.org/zh-CN |
|